| New Products |
|
UC-win/Road カメラセンサー
基本プラグインオプション |
シミュレーション |
| 魚眼レンズのような歪んだ画像をUC-win/Roadで生成 |
|
●新規価格
●リリース |
800,000円
2017年 2月28日 |
|
|
「UC-win/Roadカメラセンサー基本プラグインオプション」は、魚眼レンズのような歪んだ画像をUC-win/Road上で生成するオプション
機能を提供します。クラスターシステムによるカメラ情報の送信に対応し、各種シミュレータと連携したカメラセンサーのシミュレーションが
可能です。 |
3DCGにおけるレンダリングでは、視点位置を頂点とした四角錐体の範囲を描画する透視投影が一般的であり、UC-win/Roadでのレンダリングでもこの方式を採用しています。現実におけるカメラの場合は、CGの透視投影と同様の中心射影方式が一般的ですが、これらのレンズにも歪曲収差が少なからず存在し、完全な透視投影と一致するとは限りません。
また、広い視野角を一度に撮影可能な魚眼レンズでは、中心射影方式ではなく、中心からの距離が角度に比例する等距離射影や、中心からの面積が立体角に比例する等立体角射影といった方式が存在します。本プラグインは、実際のカメラによる撮影をUC-win/Road上でシミュレートすることを目的として開発しました。 |
|
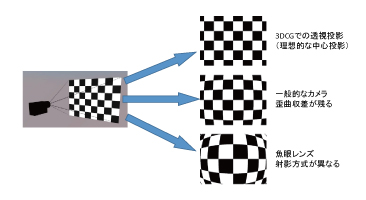 |
| ▲図1 3DCGと実際のカメラによる画像の違い |
|
本プラグインはUC-win/Roadでカメラの全周囲に向けたレンダリングを行い、その結果からカメラのパラメータに応じてシミュレート結果画像を生成します。
魚眼レンズの射影方式として、「等距離射影」、「等立体角射影」、「立体射影」、「正射影」に対応しており、射影方式と「ピクセル数」、「セルサイズ」、「焦点距離」の情報を与えることで、センサー位置における像高とカメラの方向を計算して対応させ、カメラ画像の生成を行います。
これらの射影方式とパラメータによる設定のほか、角度と像高の対応を多項式によって定義したり、CSVファイルによる歪みテーブルファイルで定義することも、さまざまなカメラのシミュレートが可能です。各種カメラセンサーの研究開発から、監視カメラを設置する際の性能や設置場所の検討など、さまざまな用途で利用できます。 |
|
 |
| ▲図2 監視カメラの設置場所の検討 |
|
| クラスターシステムにおいて、マスターからクライアントへのカメラ情報の送信をサポートします。UC-win/Roadで景観位置として設定し保持している絶対座標、オブジェクトや走行車両からの相対座標のほか、カメラセンサープラグインを使用した描画のパラメータ情報も送信できます。これにより、クラスターシステムを用いて、運転シミュレーションと同時に、運転時の車両に取り付けられたカメラセンサーのシミュレートをクラスタークライアント側で行うといった活用方法も可能となります。 |
各種カメラやセンサーをシミュレートしたい場合など、このプラグインオプションをベースとした受託開発を提供しています。実際のカメラをシミュレートした画像を生成する機能の開発から、深度情報を使用したレーザーセンサーのシミュレートなど、多様な用途に応じた開発のベースとして利用できます。
ぜひとも、各種センサーのシミュレートを含めたシミュレータの開発基盤として、カメラセンサー基本プラグインを導入いただき、UC-win/Roadを活用いただければと思います。 |
|
 |
| ▲図3 深度情報を使用した画像生成 |
|
| (Up&Coming '17 春の号) |
 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|





