| New Products & Service |
シミュレーション |
| UC-win/Road Ver.13.1 |
| UC-win/Road VRセミナー |
| 日時 : 2018年5月26日(水) 9:30〜17:00 |
| 会場 : 金沢事務所セミナールーム |
| 参加費 : 18,000円 「FORUM8 VRエンジニア認定試験」実施中! |
|
|
| 3次元リアルタイムVRシミュレーション |
●新規価格
●リリース |
Ultimate : 1,920,000円 Driving Sim : 1,280,000円
Advanced : 970,000円 Standard : 630,000円
2018年 5月 |
| UC-win/Road Advanced・VRセミナー |
| 日時 : |
岩手 2018年4月26日(木) 9:30〜17:35
札幌 2018年5月 11日(金) 9:30〜17:35 |
|
会場 : 滝沢市IPUイノベーションセンター会議室/
札幌事務所 セミナールーム |
| 「FORUM8 VRエンジニア認定試験」実施中! |
| 参加費 : 18,000円 |
|
|
| UC-win/Road・エキスパート・トレーニングセミナー |
| 日時 : |
2018年5月22日(火)〜 23日(水)
1日目:13:00〜17:30
2日目:9:30〜17:30 |
|
| 会場 : 東京本社 品川インターシティA棟セミナールーム |
| FORUM8 UC-win/Roadエキスパート試験」 実施中! |
|
|
|
|
|
|
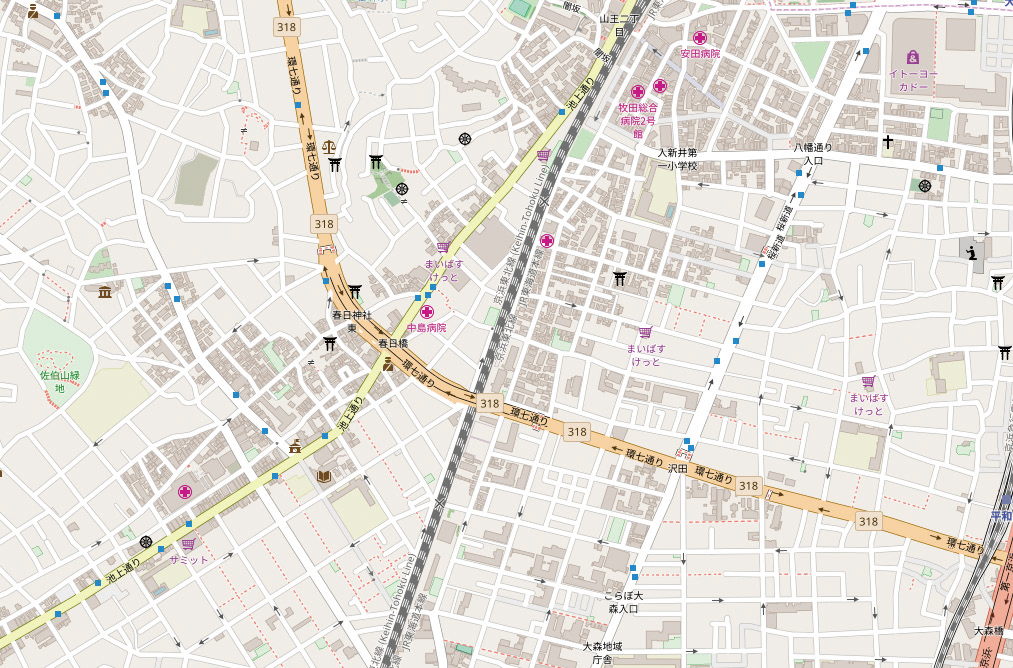
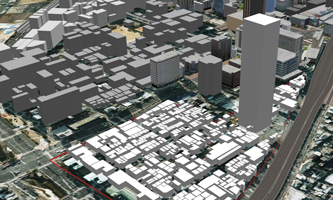
| UC-win/Road Ver.13.1ではインターネット上で利用可能な地図情報をインポートして、建物や森林を簡単に作成できる機能を提供いたします。対応するインターネット上の地図情報としては、OpenStreetMapと地理院地図を予定しています。
OpenStreetMapは自由に利用するための地図をインターネット上で有志が作成する地図作成プロジェクトです。このプロジェクトで作成された地図はブラウザ上で見られるほか、ウェブサイトで自由に使用したり、ベクトルデータを商用目的で使用することが可能です。
地理院地図は国土地理院が提供している地図情報です。利用においては国土地理院のコンテンツ利用規約を守っていただく必要がありますが、精度の高い地図情報を取得することができます。
オンライン地図情報をインポートする手順としては、まず地図情報をダウンロードしたい領域をゾーンで定義します。ゾーン編集画面からインポートボタンを選択すると、自動的に情報のダウンロードを行い、建物や森林を表示します。
 |
 |
| 図1 OpenStreetMapの地図情報 |
図2 OpenStreetMapからインポートした結果 |
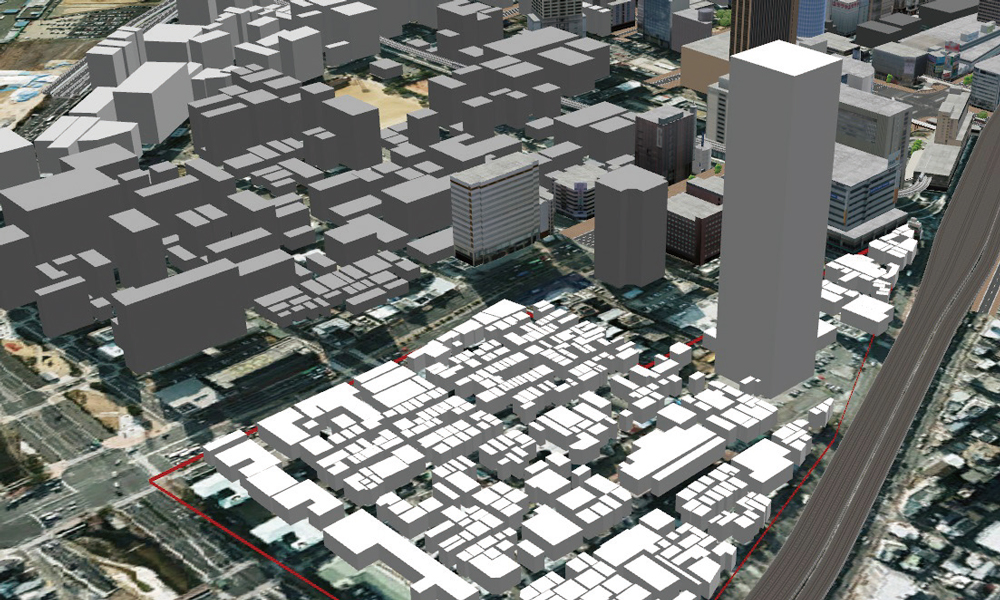
地図情報に高さが含まれている場合はその高さを使用してオブジェクトが作成されます。含まれていない場合はデフォルトの高さを適用します。オブジェクトを生成した後は、生成された建物や森の編集ができます。
| 編集はモデルを選択して個別で行うか、または建物全体・森林全体で行うことが可能です。建物オブジェクトでは高さ、色、モデルカテゴリを変更することができます。森林では、木の種類、本数、高さ、回転角を変更することができます。
地図情報からダウンロードした情報によっては、必要以上のオブジェクトが生成される場合もあるため、建物や森林ごとにモデルを生成するかしないかの選択も可能としております。
このオンライン地図情報読込機能については、OpenStreetMap、地理院地図以外にも他の地図情報提供サービスにも対応できるよう開発を進めております。お客様が使いたいデータベースがございましたら、弊社までご相談いただければと思います。
|
|
 |
| 図3 インポート後、編集した例 |
|
|
| 道路の編集や地形の編集を確定したときに行われる道路生成処理を並列化することにより、マルチコアCPUを使用している環境で計算処理の時間が短くなるように改善を行います。 道路生成処理は、地形と道路線形・横断面によってどのような道路形状となるかを計算しており、地形や道路の編集時に再計算が行われます。この処理は道路の数や地形が大きくなると時間が長くなり、作業効率が落ちてしまう原因の一つとなっていました。
| 近年はIntel Core iシリーズに代表されるようなマルチコアCPUも普及しており、複数のCPUコアで処理を分散させることによって全体の計算時間を短くする並列化処理が行えるようになっています。今回、道路生成処理を並列化処理することによって、道路生成にかかる時間を短縮することいたしました。これによって、マルチコアCPUを使用している環境においては、道路生成処理の時間が短縮されます。開発中のバージョンでは実測として、6コアのCPUを搭載した環境において、計算時間が1/3〜1/4となっており、製品版においても同程度の時間短縮が見込めます。 今後、他のUC-win/Roadの時間がかかる処理についても、順次並列化の検討を行い、これからも処理速度の改善について取り組んでまいります。
|
|
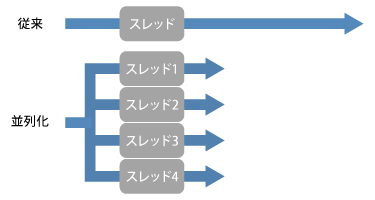 |
| 図4 並列化処理のイメージ |
|
|
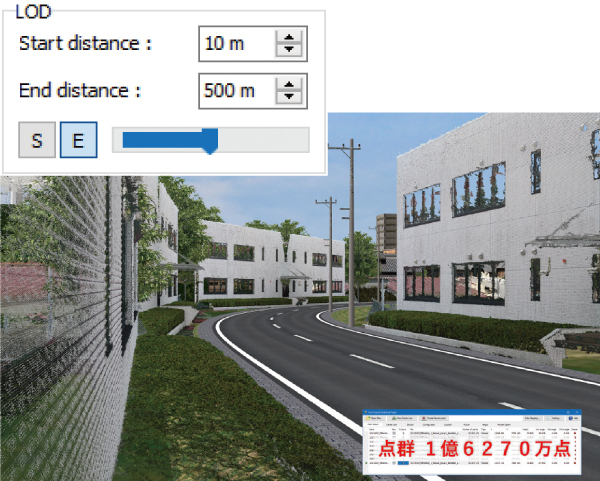
LOD対応
64bit対応によって数億点の点群を取り扱うことができるようになりました。数億点のデータをより快適に、効率よく使用出来るように点群のLOD表示に対応しました。3Dで視点付近は元の点群密度で表示して、遠くなるほど粗い点群を表示します。また遠くのデータを簡略化して表示しているが、視覚的に荒く見えないように点群密度が多い所を優先的に粗くし、遠景で点群情報が欠落しそうですが視認できる程ではありません。LODレベルは点群レンダリングオプションタブからLODの開始距離と終了距離から調整でき、設定した距離の間でLODレベルが段階的に調整されます。デフォルトで開始50m、終了500mとなっています。表示性能はPCの性能にもよりますが4億点の点群データを60fps以上で表示できます。 |
|
 |
| 図5 1.627億点の例 |
|
|
| 更新を重ねてきたプロジェクトには、少なからず余分なモデルや断面のデータが含まれており、それらはマシンのメモリを圧迫し、動作時のパフォーマンスに影響を与えます。本機能ではまず、読み込み済みのデータ相互の類似度に着目し、削除可能なデータの検出を行います。検出された類似度の高いデータ同士は、互いに代替可能と判断され、任意にひとつに統合する機会が与えられます。本機能により、動作時の省メモリ化、プロジェクトファイルの低容量化を実現し、プロジェクト操作におけるユーザビリティの向上が期待できます。 |
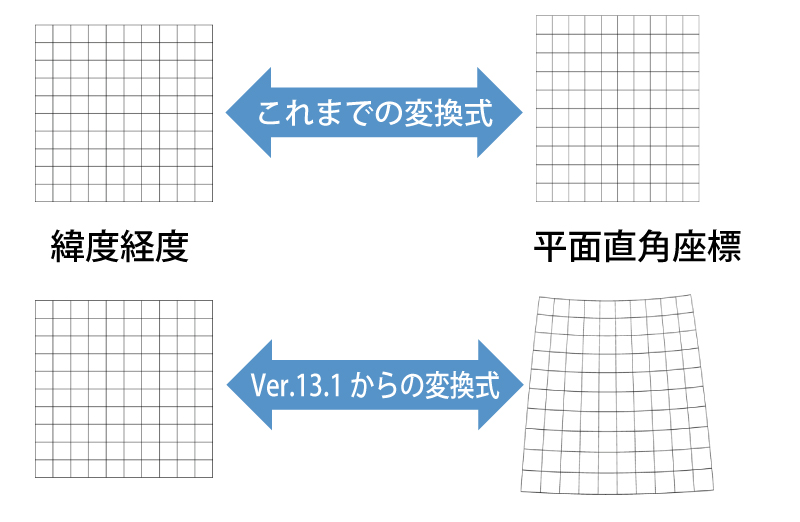
UC-win/Road Ver.13.1ではプロジェクトが保持する座標系情報を使用して、地理座標系(緯度経度)と投影座標系(平面直角座標系やUTM座標)との変換を行うように改良し、より正確なデータを作成できるように改善を行います。
|
従来のUC-win/Roadでの地理座標系と投影座標系の変換は、プロジェクト作成時に原点と対角点のそれぞれの値を保存し、各軸方向をともに東西南北と扱って、線形補完を行うことで変換をしていました。しかし実際には投影座標系は楕円体の地球を投影した座標系なので、地理座標系での長方形は投影座標系では不等辺四角形となり、軸方向は東西南北方向とは一致しません。この変換結果は正確な値ではありませんでしたが、プロジェクトがあまり大きくない場合には、VRで見る上ではあまり大きな問題にはなりませんでした。
しかし、対応する地形データの拡張を行っており、UC-win/RoadがVRだけではなく、様々な用途に適用される機会が多くなってきており、また土木分野でも3次元データでの情報流通が行われ始めている状況を踏まえると、この誤差を無視できない場面が増えてきています。このためUC-win/Road Ver.13.1では、プロジェクト情報が持つ座標系情報を使用して、UC-win/Road上の座標から緯度経度を精度よく変換するように改善いたします。
|
|
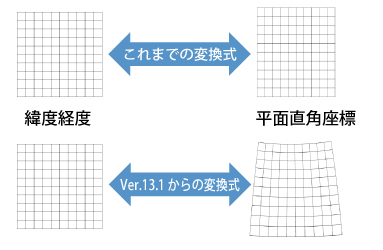 |
| 図6 緯度経度と平面直角座標の変換 |
|
UC-win/Road Ver.13.1で新規のプロジェクトを作成する場合は、緯度経度グリッドの高度情報をそのままUC-win/Roadに取り込むのではなく、UC-win/Roadのグリッドに対応する緯度経度を求めてその点に対応する高度を元データから補完することによって、より正確な地形データを作成します。これは、地理院タイルの読み込みや、Geotiffなどの読み込みにおいても対応いたします。また、UC-win/Road
13.1で表示される緯度経度の値は新しい変換を用いて求めますので、より正確な値が表示されます。
SDKによる機能開発でも、座標変換関数を使用して精度よく座標を変換でき、データの活用がこれまで以上に期待できます。
また、現在開発中のCIMクラウドソリューションサービスや、生まれ変わる次世代VR-Cloud®との連携に向けても本改良を行っておりますので、ご期待頂ければと思います。
|
| UC-win/Road Ver.13.1でマルチユーザ機能の拡張を行いました。今までクラスターマスタ・クラスタークライアントの構成の中でマスター側のシミュレーション計算の周期を決定し、各クライアントがマスターの時間刻みに従って計算を行っていました。Ver.13.1からクライアント側でも個別のタイマー(時間刻み処理)を設定することが可能になりました。本機能は特に複数のHILシステムを連携する時に重要な機能です。HILS間のタイマーを同期させることが困難で、クライアントと連動しているHILSは必ずしもマスターの時間刻みの通り動作していないケースがほとんどです。この問題を解決するためクライアント側をクライアントと連動しているHILSのタイマーに合わせて動作可能にしました。
|
| (Up&Coming '18 春の号掲載) |
 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|