フォーラムエイトでは、関西大学システム理工学部 機械工学科 倉田准教授の研究開発成果である車いすシミュレータの映像表示部分にUC-win/RoadのVR環境を利用することを提案し、共同開発に向けた協議を開始しています。
倉田准教授は、生活支援工学分野において、電動車いすについての研究に取り組んでおられます。
個人の障害の程度や部位を考慮し、これからの電動車いすのあるべき姿と、車いす利用時の事故発生の危険性を認知して、より安全な利用が可能となるシステムづくりについて、日々、研究・開発に取り組んでおられます。
最近では、研究開発成果として、車いすシミュレータハードウェア本体に両輪別駆動のトルクセンサー付き車輪を実装されました。
これにより、トルクセンサーから車速を算出する計算式を作成し、速度の実測値との検証もほぼ一致したという結果を得られたとのことです。
これには、路面状態により変化する路面抵抗のモデル化が鍵となるとのことで、実走データとの比較などを行い慎重に取り組んでおられました。この計算式を車いすの運動モデル(ダイナミクス)として使用できる可能性が高いことから、弊社よりUC-win/RoadのVR空間を車いすシミュレータの表示部分として活用することをご提案させていただき、検討いただいています。弊社側においても、車いすシミュレータからの実測値のデータをUC-win/Roadに読み込むことで、VR空間内を移動可能であるかについて検証を実施する予定です。
将来の電動車いすの研究開発において効果的なシミュレータの構築を目指し、今後も協議を進めていく予定です。ご期待ください。
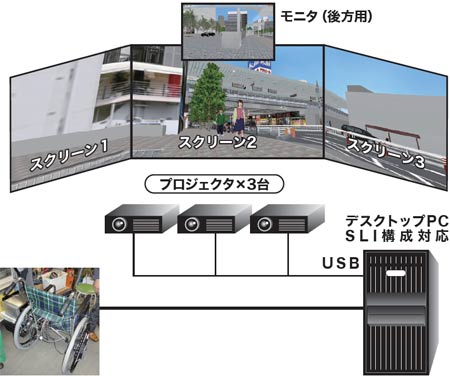 |
| ■車いすシミュレータ構成イメージ |
 |
|
 |
 |
|
| ■車いすシミュレータハードウェア連携部分構成図、フロー |
|
■UC-win/Road MD3キャラクタによる
車いす事例サンプル |
|
|
|
| (Up&Coming '11 新緑の号掲載) |
 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|





