|
|
|
●はじめに
UC-win/Roadは、細かいモジュールにより構成されていることで、高度、低コストのカスタマイズ開発が可能になっています。既存の機能の変更と機能の追加はモジュールおよびモジュール同士の入出力の変更と追加で対応します。既存のモジュールの新たな組み合わせで新機能の作成もできます。カスタマイズ基本手順やカスタマイズの実例を中心にご紹介いたします。
●モジュールの変更/追加
ドライビングシミュレーションシステム
本カスタマイズは、UC-win/Road車輌運動モデルの変更、ユーザのハードウエアへの変更及び運転状況のログ出力を求められました。カスタマイズを行なう前のモジュール構成が以下の図に示されています。通常のゲームコントローラーからペダルとステアリングハンドルの操作量を入力し、車輌の運動を計算します。更に、車輌の加速度と軌道の計算を独立したモジュールで行います。
従来の「車輌加速度の計算」モジュールを変更しましたが、これで車輌のエンジン運動モデルのカスタマイズが可能となりました。また、「車輌軌道の計算」モジュールの変更で、路面とタイヤの密着モデルを要求に合わせることができました。「アナログペダル装置入力」および「ペダル操作入力切替」モジュールの追加で、ゲームコントローラと他のハードウエアの共存を確保し、アナログ装置への対応ができました。最後に「ログ取得と保存」モジュールを追加したことによって、ドライビングシミュレーションに関する情報の取得と出力が可能になりました。最終的なモジュール構成は右図のとおりです。 |
 |
●新モジュールの開発
カスタマイズで実現する場合に基本技術を独自開発し、幅広くパッケージの新機能として生かせるように設計、開発を進めています。運転シミュレーションを大きく向上する走行シナリオ機能は、カスタマイズ提供を経て蓄積してきたノウハウを生かして開発を進め、次バージョンUC-win/Road
3.4に新たな機能として搭載されます。シナリオ機能により、走行中にイベント発動させ、運転者の反応を引き出したり、様々な運転のストーリーを展開させることができます。また、コンピューターグラフィックスの最新技術に関しても、次期製品VR-StudioのためにShaders言語を採用し、地形のテクスチャ処理や光源の高度な表現などを開発しています。これらには、カスタマイズで実現が必要であったことから基本技術から独自開発したものもあります。
| ■ヘッドライトシステム |
 |
|
 |
| ▲Shaders言語を採用し、光源の高度な表現を実現 |
●UC-win/Roadデモシミュレータ
UC-win/Roadデモシミュレータは、展示や簡易な案内用のシミュレータとして開発したもので、コンパクトな設計となっており、簡易ステアリング、アクセル・ブレーキペダル、操作ボタン(2個)、17インチタッチパネルを装備しています。筐体内部にパソコン本体が収納されており、道の駅での安全運転喚起のための広報用シミュレータ等として採用されています。
ソフトウェア部分は、UC-win/Roadを利用しているため、利用目的に応じた自由な3次元走行環境を比較的安価に作成することができます。
展示広報館における常設展示や、道路施設等のPR用として展示会での展示に利用いただけるシステムとなっています。
 |
|
 |
| ▲UC-win/Roadデモシミュレータ展示の模様 |
|
▲正面写真 |
●UC-win/Roadドライブシミュレータ・モーションプラットフォーム
UC-win/Roadドライブシミュレータのオプションである「モーションプラットフォーム」は、UC-win/Roadのドライブシミュレータをより体感的なシステムとするために準備されています。モーションプラットフォームは、自由度の数、対応可能重量、再現可能加速度と反応力、再現可能可動範囲などが価格に影響し、現在当社のUC-win/Roadドライブシミュレータより高価なものとなります。自由度としては、一般にピッチ(Pitch)、ロール(Roll)、ヨー(Yaw)、スウエー(Sway)、サージ(Surge)、ヒーブ(Heave)の6軸があります。現在、UC-win/Roadモーションプラットフォームオプションの開発を予定しており、自由度にかかわらず利用できるプラグインを開発する予定です。
| シミュレータ製品群 |
(PC本体別売/ハードウェア保証は製造会社規定に基づく) |
| Concept(販売開始) |
主要内容 |
主要内容 |

Compact Research Simulator(2007年)
|
485万円
(1ch 基準) |
・研究用シミュレータ(UC-win/Road含む)
・全部品に実自動車部品使用
・左右ハンドル可、オートマ標準(マニュアルOp.)
・Active Steering Wheel (世界最高水準)
・計器盤に実部品使用※MPF/3chオプション別売 |

SUBARU Driving Simulator(2008年) |
予定価格750万円
(1ch 基準) |
・体験用シミュレータ
・6軸(350kgf)モーションプラットフォーム
・一部に実自動車部品使用
・フォースフィードバックステアリングシステム
※UC-win/Road、DS/MPFオプション別売 |

Demo Simulator(2007年) |
100万円
(1ch 基準) |
・簡易シミュレータ
・展示、案内用コンパクトタイプ、Start/Stopボタン
・ハンドル、アクセル、ブレーキ実装 |
|
●鉄道シミュレータ (列車運行シミュレータ)
訓練用シミュレータ、研究開発用等に対応が可能
 |
| ▲大型鉄道シミュレータ(イメージ図) |
 |
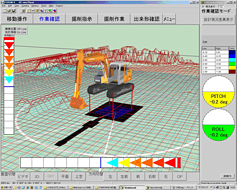
●作業機械の遠隔操作マンマシンインターフェイス
本開発は、平成19年度、機械化施工における情報化施工研究の一環として(社)日本建設機械化協会施工技術総合研究所様からの委託開発として行われたものです。危険区域内における無人化遠隔操作において、掘削精度・掘削作業の効率を確保するためには、建設機械の作業状況を正確、且つリアルタイムにオペレータに伝えるインターフェイスの良否が常に問題となってきますが、オペレータ側のインターフェイスにUC−win/Roadを採用し、3次元VR上でリアルタイムに作業状況の確認と作業指示を行うための表示、及び操作機能を開発実装し、現場実験を行って確認を行いました。
| 1) |
3次元情報 (写真、画面)
建設機械に搭載したGPS、地形レーザスキャン、ビデオカメラ装置と、それらを制御するパソコンシステムから無線LANにより送信される情報を受信し、地形データは3次元地形データとして表現し、位置情報や建機の動作情報は3次元VR空間上に可動モデルとして配置した建機モデルに反映して、実物の動作をリアルタイムに表現した。 |
| 2) |
施工ステップでの作業指示
本システムでの作業(操作)の流れは右図の通り、
移動操作 → 作業確認→ 掘削指示 → 出来形確認
である。各作業ステップでの作業指示を、オペレータが本インターフェイスだけを見て行うため、平面、断面、3D表示機能を、ステップに合わせて表示切り替え可能とすることで、操作しやすく、見やすい構成を検討し実装した。 |
| 3) |
横断面表示
掘削作業中では、建機と掘削目標を結ぶ方向の横断面上に、現況地形と設計地形ラインを重ねて表示し、現状地形と設計地形の状況をリアルタイムに確認可能である。 |
| 4) |
出来形確認
作業開始前に指定する設計形状(作業目標形状)と、レーザスキャンにより計測された現況形状と平面メッシュとして重ねて表示し、高さの差異より出来形状況を数値、及びグラデーション表示で確認可能である。 |
今後もより高度で柔軟なシステムの開発に「UC-win/Roadカスタマイズシステム」をご利用下さい。
|
| (Up&Coming '08 新緑の号掲載) |
 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|