よりリアルな運動表現が可能に
自動車(4輪車)の運動モデルに改良を加えることで、UC-win/Roadでのドライビングシミュレーションの忠実度が改善しました。運転中の車両全体の動き、エンジン、エンジンから車輪までの各伝達装置のモデルを実装し、よりリアルな運動の表現が可能となりました。これにより、以下のような現象が再現されます。
■車の横滑り:
アンダーステアとオーバーステアの表現が可能です。
■アンダーステア:
高速で走行する際、前輪の角度を低速の走行時より大きくしなければ車が同じように曲がらない現象です(図1)。
速度が高すぎるとステアリングハンドルを回しても車がほとんど曲がらないことがあり、安全な運転ができません。
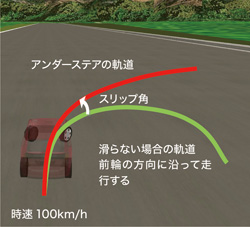
▲図1 アンダーステアの説明図
■オーバーステア:
曲がる途中に後輪が滑って通常より急な回転が発生する現象です。
■前後方向の滑り:
車両の進行方向に車両が滑る表現が可能です。特に、滑りやすい路面上で急発進または急ブレーキにより発生する現象で、この滑りによって加速性能が低下し停止距離が長くなります。
■路面とタイヤの属性によるグリップ性能:
路面の摩擦係数を設定して、さまざまな路面状態を再現できます。これにより、乾燥した路面だけではなく、雪、水、氷上での車両の走行特性が表現可能になりました(図2)。また、白線と路面のグリップの差も設定できます。路面の設定に合わせて各車両の摩擦係数が設定できるので、それぞれの車両の特性が詳細に再現されます。現実には規制速度、路面の状況、車の特性を考慮して走行する必要があります。今回リリースする機能でタイヤの滑りを表現することで現実に近い条件で走行できるようになります。

▲図2 停止距離と路面の関係
■滑らかギアシフト:
手動でのギアチェンジを可能にすると同時に、自動ギアチェンジのモデルを改善しました。これにより、ギアシフト時のエンジン回転数の変化が従来より滑らかになりました(図3、4)。
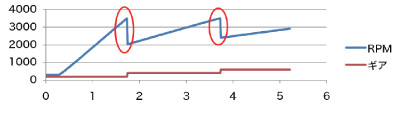
▲図3 UC-win/Road Ver.5.0以下では、
ギアシフトアップ時のRPMの変化が急激となっていた
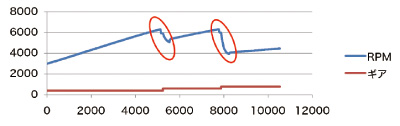
▲図4 UC-win/Road Ver.5.1から、ギアシフトアップ時に
RPMが内部クラッチ操作により補間されるようになった
■車輪の回転速度の忠実度:
車輪ごとに回転速度を計算するよう改善を行いました。カーブの際、内側と外側の車輪が違う速度で回転したり、ブレーキを強く掛けるとブレーキが掛かった車輪が止まって路面上に滑るなどの現象が表現可能になりました。
■後退:
車両の運動モデルで後退走行が可能になりました。
■車両の運動モデルの選択:
従来の運動モデルと今回新しく開発したモデルから、使用するモデルを選択できます。VR空間での走行に慣れていない方や、子供用の体験シミュレータなど、必要に応じてより単純な従来のモデルを選択可能です。
|
UC-win/Roadでモデル化した主なパーツは下記の通りになります。
■エンジン:
アクセルペダルの操作量によってエンジンのトルクを計算します。エンジンで最大のトルクと最小のトルク、2つのカーブを持ってアクセル時とエンジンブレーキを表現します。UC-win/Road
5.1では、最小トルク(エンジンブレーキ)のカーブは編集できるようになります。
■クラッチ:
エンジンの回転軸と変速装置の回転軸を結合するもので、クラッチの結合状態によってエンジンから一部または全体のトルクを変速装置に伝えます。クラッチが切れているとエンジンが抵抗なく回転します。逆に、クラッチがつながっていると、エンジンと車輪の回転速度が連携しています。よって、クラッチの結合状態により変速装置に伝える力およびエンジンの回転数を計算します。
■変速装置:
エンジンの力をある比で次の差動装置に伝えます。自動車内部の各ギアを実現します。
■オートクラッチ制御:
クラッチの結合状態の制御およびギアの選択を行うモジュールです。UC-win/Roadでの自動車の挙動モデルはマニュアル車に近いものですが、オートマチック車を表現するためにオートクラッチ装置を実装しました。これは、マニュアル車にあるクラッチおよび変速装置を自動的に制御するものです。また、発進時、ブレーキ時、通常走行といった状況に応じてクラッチ、シフトアップとシフトダウンの操作を行います。
■差動装置:
カーブを曲がる時内側の車輪と外側の車輪の速度の差が生じます。エンジンから出力される1つのトルクを分配し、それぞれの車輪が異なる速度で回転できるように差動装置が使われています。物理的に見ると、抵抗力の少ない車輪に多くのトルクが伝達されます。車が曲がる時は、外側の車輪が内側の車輪より早く進みます。その結果、外側の車輪には路面から生じる抵抗力が少ないため、トルクは外側の車輪により多く伝えられます。また、左側の車輪が凍った表面を走り、右側は乾燥した路面であれば、左側の車輪が滑って早く回転する現象もあります。
■差動装置の構成:
車種によって実際に使われる差動装置の数が異なります。前輪と後輪にエンジンのトルクを伝える場合は(4WD車)前と後ろのトルクを分ける差動装置を使用し、また前輪と後輪において左右を分ける2つの差動装置を使用します。前輪あるいは後輪だけにエンジンのトルクを伝えると1つの差動装置が使われます。前輪にトルクを伝えるとフロントフロント(FF)といい、後輪に伝える場合はフロントリア(FR)といいます。
■車輪:
エンジンから出力されるトルクが各伝達装置を通って車輪に伝わります。このトルクに加え、ブレーキトルク、路面の摩擦におけるトルクが車輪をある速度で回転させます。また、この回転によって車輪が路面にかける力があります。路面から見ると(外から見ると)路面が各車輪に力をかけ、その力が車輌に伝わって車輌を動かします。左右の力が異なると偶力が働き車が回転します。
■重心の位置:
UC-win/Roadで重心の位置を設定することが可能です。この位置によって各車輪にかかる重力が変わるので車輪における摩擦力が変化します。たとえば、重心の位置を変更させるとFR(フロント・リア)とMR(ミドル・リア)の車の区別ができます。FRではエンジンが車の前に置かれていますが、MRの場合は車の中央に置かれています。エンジンが重いため、置かれる位置によって車輌の重心の位置が変わります。
-
▲図5 UC-win/Roadの車両運動モデルの構成
|
■摩擦係数のカーブ:
路面とタイヤの間に発生する摩擦力を定義するカーブです。自動車の物理モデルで摩擦力を計算するモデルが多く存在します。タイヤの滑りを表現するために、複雑な有限要素法から比較的単純なクーロン摩擦法則まで、さまざまなモデルがあります。
UC-win/Roadではスリップ比(Slip Ratio)による摩擦係数のカーブを使用します。このカーブは編集可能で、路面の属性として持たせるのでさまざまな路面の状態を設定することが可能になります。
スリップ比は車両の速度とタイヤ外側の表面の速度の差を表しています。スリップ比の式は下記の通りになります。
 スリップ比の値は-1と+1の間になることが分かります。また、車両の速度とタイヤ面の速度が同じ場合はスリップ比が0となり、車が滑らないという意味です。車両の速度よりタイヤ面の速度が速い場合はタイヤが滑っている状態で、スリップ比が0より大きくなります。
スリップ比の値は-1と+1の間になることが分かります。また、車両の速度とタイヤ面の速度が同じ場合はスリップ比が0となり、車が滑らないという意味です。車両の速度よりタイヤ面の速度が速い場合はタイヤが滑っている状態で、スリップ比が0より大きくなります。
通常、[-0.1 .. 0.1]の間では車はほとんど滑らないと見られ、スリップ比によって摩擦係数が線形に変化します。スリップ比の値が0.1より大きい場合は車が滑りながら加速し、滑っている状態で摩擦係数がほぼ一定の値になります。また、-0.1より小さい場合は滑りながら減速し、同様に滑っている状態で摩擦係数がほぼ一定の値になります(図6)。
▲図6 摩擦係数カーブの例
■エンジン:
エンジンの最大トルクおよび最小トルクを設定できます(図7)。さらに、エンジンの回転速度を計算するためにエンジンの慣性モーメントが必要です。エンジンの慣性モーメントも設定可能です。
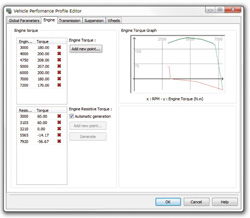
▲図7 緑色:最大トルク、赤い色:最小トルク(エンジンブレーキ)
■ギアの設定:
変速装置の設定で各ギアの比および後退のギア比が設定可能です。ギアチェンジのモードはオートマチックとマニュアルから選択できます。
■差動装置の構成:
エンジンの力がどの車輪に伝わるかを設定するために差動装置の構成が選択できます。2WDのFF、FRまた4WDの構成の表現が可能です。
■ファイナルドライブ比、伝達の性能:
このパラメータで伝達の最終的な比および性能の設定が可能です。
■ヨー角の慣性モーメント:
車の回転の計算に使用するパラメータです。慣性モーメントが大きくなると車の反応が遅くなります。
■重心の位置:
重心の位置を設定することで質量の配置(エンジンの位置、乗客の位置)が設定できます。
■ブレーキ力の分配:
前輪と後輪におけるブレーキ応力の比率を設定できるようになりました。
■車輪:
慣性モーメントで車輪の回転数の計算に使用するパラメータです。慣性モーメントが大きくなると車輪の反応が遅くなります。車輪転がりによる摩擦係数および車輪半径も設定可能です。
|
従来のバージョンでは、自車が路肩に接触した時、道路の進行方向に車両を戻し、速度を落とす処理を実行していました。今回リリースするプログラムでは、この処理を改善し、自車が路肩に接触した際に路肩を超えないよう車両に力を掛ける処理を実装しました。
これにより、車両の方向と速度が急激に変化せずに力を掛けるため、サスペンションの働きも分かり、壁にぶつかったような効果になります。今後もこの処理を改善し他の車両との接触判定を開発する予定です。
|
路面と車輪の間で発生する摩擦力を計算するために、摩擦係数が必要です。計算中ではスリップ比による摩擦係数のカーブを利用しますが、このカーブを路面の属性として設定します。
また各車両の設定として、摩擦比率のみを設定します。最終的な摩擦係数は現在走行している路面の摩擦係数カーブを車両の摩擦比率に掛けて求めます。
路面の設定は道路の横断面に使用するテクスチャごとに設定可能になります。走行する車道の中で各車線のテクスチャおよび白線のテクスチャを設定すれば細かな効果を得られます(図8)。今後の開発では、車道以外の表面を走行できるようにしたいと考えています。
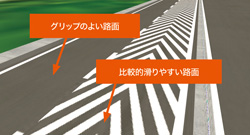
▲図8 路面の摩擦係数の差
|
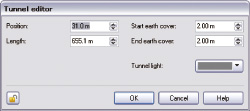
UC-win/Road 5.1で、トンネル空間の照明を設定できるようになりました(図9)。トンネルごとに照明の色と強さを設定します。また、設定項目は1つで、色の明るさで照明の強さが変わります。
トンネルの照明機能を使うと、トンネル内の照明と外部の太陽光の区別が可能となり、より忠実な表現となります。トンネル内の照明は、トンネルに入る交通車両、道路の附属物に適用されます。特に改善された点は、自車のコックピットの表現、トンネルの入り口と出口の表現になります(図10、11)。なお、このバージョンでは、任意のモデルの配置でトンネルの中にモデルを配置した場合には照明機能は有効となりません。
 |
|
 |
|
 |
▲図9
トンネルの設定画面:
光の色:白、光の強さ:中 |
|
▲図10
トンネルの出入り口付近のイメージ |
|
▲図11
トンネル運転時の
自車コックピット表現も
よりリアルに |
|
UC-win/Road 5.1ではVISSIMの交通流解析結果を読み込んで可視化できるようになりました。VISSIMは、PTV社により開発されている交通流シミュレーションソフトウエアで、歩行者と自動車の交通シミュレーションを統合したソリューションです(URL:http://www.vissim.de)。
マイクロシミュレーションプレーヤーを用いて、VISSIMのANI.TXTファイルをUC-win/Roadに読み込みます。シミュレーション結果を読み込んだ後、シミュレーションを表示する位置を設定し、車両と歩行者をどのモデルで表示するかを設定します。
最終的には、動画ファイルのように交通解析結果の再生を操作し、3D空間の中で交通の状況を確認できます(図12)。

▲図12 VISSIMによる交通流解析結果をUC-win/Roadに読み込んで再生
|
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|



