近年、乗用車の高機能化が進む中で、自動駐車支援システムを搭載した車が増えています。
このシステムは、カメラ画像や超音波センサの情報をもとに、駐車時のステアリング操作を車が自動で行うというものです。
運転手は周囲の状況へ気を配る必要はありますが、基本は音声案内に従いアクセル、ブレーキ、セレクトレバーを操作することで、車庫入れや縦列駐車を簡単に行うことができます。また、高精度な超音波センサを使用することで、障害物の自動検知や停止も可能です。
現在、自動駐車支援システムは、トヨタのプリウスやLexusブランドの車、VWのPark
AssistやBMW のAutoParking System、Hondaのスマートパーキングアシストと、多くの自動車メーカーで用いられています。
|
フォーラムエイトでは、車両軌跡・駐車場設計・自動駐車システムの統合ソリューションを提案いたします。弊社UC-1シリーズの車両軌跡作図システムでは、「セミトレーラ及びフルトレーラの直角旋回軌跡図の様式(JASO Z006-92),社団法人自動車技術会」などの作図理論に基づいて、車両の走行軌跡を計算・作図し、想定した路線や既存の路線に対する走行シミュレーション、車両軌跡の作図を効率的に行えます(図1、2)。作成した図面は、UC-1シリーズ駐車場作図システムとの連携により、駐車マスの出入りに問題がないかなど検討しながら駐車場設計が可能です(図3、4)。この駐車場図面を、UC-win/Roadに取り込んでVR空間上の駐車場を生成したり、図面をプリントアウトして、RoboCar®がシミュレーション走行を行う敷地として利用します。
 |
 |
| ■図1 車両軌跡作図システム−車両登録の設定 |
■図2 車両軌跡図面確認 |
 |
 |
| ■図3 駐車場作図システム−駐車マスの一括配置 |
■図4 駐車場・車両軌跡CAD連携結果 |
|
フォーラムエイトでは、ロボット工学分野のシミュレーションとして、RoboCar®を用いています。RoboCar®は車の縮小モデルで、搭載したデバイスやソフトウェアを使うことで、自律走行など複雑な制御を行えます。RoboCar®はLinuxをベースとしたメインボードで管理されており、外部からワイヤレスLANを用いて操作することができます。UC-win/Road
for RoboCar®は、3次元リアルタイムVRとRoboCar®を連携するシステムです。このシステムを用いることで3DVR環境でシミュレーションを行いながら、現実空間での動作を確認することができます。
また、UC-win/Roadドライブシミュレータを使うことで、RoboCar®の運転も可能です。
|
RoboCar®のシミュレーションを適切に行うために、UC-win/Roadは正確な位置情報を把握する必要があります。RoboCar®は走行距離計測法を用いることで、現在位置を推定します。走行距離走行法は、車輪やモータの回転数をエンコーダで計測し、回転数の違いなどから位置を算出します。しかし、この手法では車輪のスリップや車輪幅の変動などエラーが多く、走行距離に応じて誤差が生じます。
この問題を解決するには、GPSのように定期的に実際の位置情報を得ることが必要です。
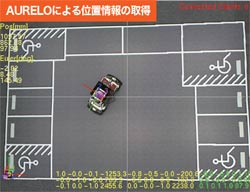
AURELO(拡張現実位置決定システム:AUgmented REality LOcalizationsystem)は、RoboCar®の絶対位置・方位情報を追跡するためのシステムです。ライブビデオから、ARMarkerと呼ばれるマーカーの3次元座標(x,y,z)及び方位(α,β,γ)を取得します。
パターンの異なる2つのマーカーを同時に使用することで、RoboCar®の位置・方位をリアルタイムで測定できます。測定誤差は、カメラとマーカーの距離が1.5mより短い場合、位置7mm未満、方位2度未満です。カメラが離れると測定の精度は下がりますが、広範囲から座標を得ることができます(図5)。
 |
 |
 |
| ■図5 AURELOを活用したRoboCar®自動駐車シミュレーション |
|
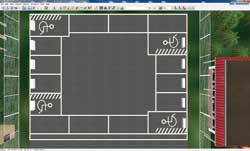
現在、フォーラムエイトではRoboCar®の機能の1つとして、任意の地点から、指定の駐車枠へ車庫入れ・縦列駐車を自動で行える自動駐車システムを開発しています(図5)。RoboCar®はUC-win/Roadのモデルと同期しており、自動駐車の様子についてVRで確認できます(図6)。UC-win/Roadでは、VRを用いて現実と同じような駐車場を簡単に再現し、自由に視点を変更できるので、さまざまな方向から自動駐車の様子を確認できます(図7)。RoboCar®の自動駐車システムでは、AI(人工知能:Artificial
Intelligence)を使用しています。AIとは、コンピュータに人間と同様の知的処理を実現させる技術です。ここでは、経路の探索・決定を行います(図8)。
 |
 |
| ■図6 自動駐車の様子をUC-win/Road上で確認 |
■図7 駐車場のVR表現。
任意の視点から駐車場の様子を確認できる |
 |
| ■図8 RoboCar®自動駐車システム概要 |
RoboCar®の現在位置はAURELOの位置・方位情報を使います。また、駐車目標地点は、自動駐車システムの持つ駐車場の地図をもとにします。常にRoboCar®の正確な位置情報を得ることで、経路とずれが生じた場合は、AIがただちにルートを修正します。AIは複数のルートから効率のよいルートを選択するほか、ルート上の障害物を回避したり、その際に新しいルートを探索するなど、人間が運転する場合と同様に考え、動作します。UC-win/Roadではステアリングコントローラーを使ったドライブシミュレーションをサポートしています。今回、新たな機能としてフォースフィードバック機能を開発しました。フォースフィードバックとは、ステアリングに抵抗感を加える機能で、回転量に応じて抵抗感が増加します。自動駐車システムでは、実際の自動駐車支援システムのように、自動でステアリングの回転する様子を再現しています。また、ステアリング上のボタンを押すことで自動駐車を開始したり、停止させる事ができます。アクセル・ブレーキ操作を行うことも可能です。今回の自動駐車システムはRoboCar®を外部から制御していますが、次の段階では、RoboCar®内部へ搭載する予定です。RoboCar®自身がAURELOからの情報取得、経路探索・決定を行うほかに、ステレオカメラなどのセンサ情報をもとに、自身で駐車可能なスペースを探索するなど、より現実に近い自動駐車を行えるよう開発を進めています。 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|



