| New Products |
|
|
●最新版製品価格 |
●リリース 2012年10月
UC-winシリーズ シミュレーション |
|
|
|
UC-win/Roadは、大規模な3次元空間、VR(バーチャルリアリティ)を簡易な手順と操作で作成可能なリアルタイムVRソフトウェアです。今回リリースするVer.8では、以下に示す拡張、改善を行いました。
|
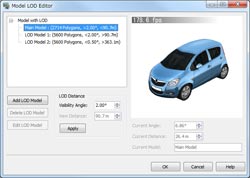
LOD(Level Of Detail)とは、視点からの距離に応じて描画対象のクオリティを変化させパフォーマンスを向上する技術のことです。従来はキャラクターの表示にLOD機能がありましたが、Ver.8では3DモデルとFBXシーンモデルにおいてもLOD機能が適用できるようになりました。
3次元空間上の描画においては、視点からの距離が遠くなると小さく描画されるため、ある程度遠くなると、どんなにハイクオリティなモデルであってもほとんど判別できなくなります。これを利用したのがLOD機能で、視点から遠いモデルに対しては、描画負荷の小さな低クオリティ(ポリゴン数の少ない)モデルを適用します。これにより、見た目のクオリティを変えることなく全体の描画パフォーマンスを向上させることが可能です。
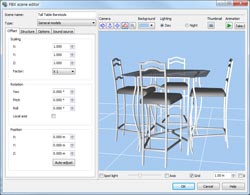
LOD機能を用いるには、まず図1のように異なるクオリティのモデルを用意します。次に図2の設定画面において、各モデルと、各モデルを適用する距離を視野角で設定します。これにより、3次元空間上のモデルが距離に応じて自動的に切り替わります。図3は、これを示した例です。遠くのモデルはクオリティの低いモデルとなっていますが、見た目にはあまり違いが分かりません。なお、LODモデルは何段階にも設定することができますので、描画の質と速度のバランスを調整してご使用ください。
 |
 |
 |
| ■図1 3段階のクオリティのモデル |
■図2 LODモデルの設定画面 |
■図3 3段階のLODモデルを設置した例 |
最後に、LOD機能を有効にした車両モデルを100台走らせるサンプルを作成し、シーン全体のfpsを計測した結果を表1に示します。100台程度のLODを適用しただけで、シーン全体で13〜19%の改善効果が得られています。更にビルなどのモデルにも適用すれば、より大きなパフォーマンス向上が期待できます。
|
LODなし(fps) |
LODあり(fps) |
改善率(%) |
| ケース1 |
38 |
43 |
13% |
| ケース2 |
26 |
31 |
19% |
|
| ■表1 100モデルのパフォーマンス比較 |
|
UC-win/Roadは、標準で高精度な車両の物理計算を行う車両運動モデルを搭載しており、エンジン、トランスミッション、車重や重心位置、タイヤの摩擦係数などを考慮した計算を行うことが可能です。今回の改訂では、より現実的な運転シミュレーションを行えるようにしました。
1. トルクコンバータ
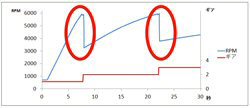
一般のオートマチックトランスミッション(AT)の車には、エンジンの回転をオイル(ATF)を介して変速装置(トランスミッション)に伝えるトルクコンバータ(油圧式回転力変換機)と呼ばれる機構があります。マニュアル車のクラッチに相当するもので、従来は独自の近似モデルを用いていましたが、今回の改訂によりトルクコンバータの特性を厳密にモデル化するよう改善しました。これにより、トルクコンバータが持つトルク増幅作用やクリープ現象をリアルに表現できるようになっただけでなく、図4の赤枠のように、ギアチェンジ時のエンジン回転数の変化が滑らかになりました。
 |
 |
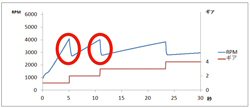 |
| ■図4 シフトタイミングの比較(上:Ver.7、下:Ver.8) |
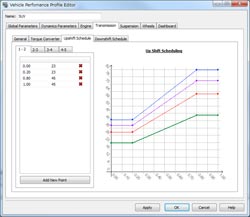
■図5 シフトスケジュール設定画面 |
2. シフトスケジュールの改善
オートマチックトランスミッションのシフトスケジュール(ギアチェンジのタイミング)のアルゴリズムを改善しました。具体的には、車速とトルク(エンジンの力)ではなく、車速とアクセル開度を図5のシフトスケジュールのグラフ(横軸がアクセル開度、縦軸が車速で、各ギアの領域をまたいだときギアチェンジする)に当てはめて制御します。これにより、急加速時や上り坂などの高負荷時は高回転を、通常走行時は低回転を用いるようなギアを選択するようになりました。また、自然なキックダウン(アクセルを大きく踏み込んだ際の低速ギアへのシフトダウン)が可能になりました。なお、図4は、ゆっくり加速した場合の経過時間ごとのエンジン回転数(RPM)のログをグラフ化したものです。上図(Ver.7)では、ゆっくり加速しているにもかかわらず6000RPMまで使っていますが、下図(Ver.8)では適切なタイミングで小刻みにシフトアップしていることが分かります。
3. ABS
急ブレーキあるいは低摩擦路でのブレーキ操作において、車輪のロックによる滑走発生を低減する装置ABS(アンチロック・ブレーキ・システム)に対応しました。
4. マニュアルのクラッチ操作性改善
マニュアルトランスミッションのクラッチモデルに、いわゆる半クラッチの概念を取り入れました。これにより、停止状態からの発進時にエンジン回転数が落ちすぎることなくスムーズに操作できるようになりました。
|
今回の改訂では、従来よりご要望の多かった地形の生成機能の拡張を行いました。
1. 大規模地形の生成
Ver.7では、最大で20km×20kmまでの地形しか生成することができませんでしたが、今回の改訂において、100kmを超えるような大規模地形の生成に対応しました。これにより、従来では取り扱えなかった広範囲な3次元空間が構築できるようになります(図6)。
 |
| ■図6 大規模地形(東京〜名古屋間)の例 |
2. 柔軟な地形サイズ
地図上の任意の矩形領域をマウスで指定するだけで、任意の位置、範囲の地形を容易に生成することができます。メッシュを選択するのではなく、また縦横比の制限もないため、柔軟に生成可能です。緯度経度による指定にも対応しています(図7)。
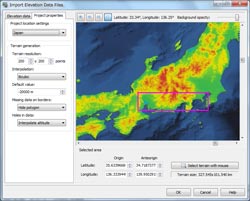 |
| ■図7 地形生成範囲の指定 |
3. 対応フォーマット拡張
従来の国土地理院の数値地図50mメッシュなどと合わせて、下記のフォーマットのインポートをサポートしました。
・SRTM90(90mメッシュ)
・ASTER(30mメッシュ)
・BlueMarbleNextGeneration(500mメッシュ)※海底の地形にも対応
4. 地形の解像度の指定
生成する地形の解像度(格子数)を指定することができます。格子点の標高はメッシュデータからBicubic法などにより補完するため、高精細な地形が生成可能です。
|
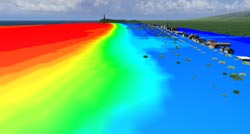
大学や研究機関で開発された津波解析コードの結果や市販の津波解析プログラムの結果など、様々なシミュレーションの結果の再生、可視化を可能にする汎用プラグインとして、津波プラグインを開発しました(有償オプション)。本プラグインの特長を以下に示します。
- 弊社独自のオープンフォーマットを公開。本フォーマットに変換することでどのような結果も可視化可能。
- 解析に用いた地形メッシュデータも取り込み可能。
- 水深のコンター図や流速、波力の可視化だけでなく、水面の反射、さざ波などリアリティの高い表現が可能。
 |
 |
| ■図8 侵水深によるコンター表示 |
■図9 水面の反射による表現 |
※UC-win/Road Ver.8.0.1でリリース予定。
|
運転車両の座標や向き、速度、ハンドル舵角などの情報をログ出力するプラグインを開発しました(有償オプション)。交通流やキャラクターの出力もサポートしており、CSV形式で保存するだけでなく、ネットワークを通じたリアルタイムUDP出力もサポートします。
| ログ出力データ |
| 基本データ |
シミュレーション時間、モデル名、モデルID、モデル種別 |
| 座標、姿勢 |
X座標、Y座標、Z座標、ピッチ角、ヨー角、ロール角、ベクトル |
| 動力、速度 |
エンジン回転数、ギヤ番号、車速(km/h, m/s)、速度制限 |
| 入力 |
ハンドル角、アクセル開度、ブレーキ量、自動運転 |
■表2 ログ出力データの例
|
FBXファイルの最新版(FBX 2013)の読み込みをサポートしました。また、これまで適切に読み込まれないことが多かったColladaファイル(*.dae)の読み込みが大幅に改善され、SketchUpで作成したデータや3Dギャラリーなどの多数のデータを利用することが可能になりました(図10)
 |
| ■図10 SketchUpのサンプルデータの読み込み(Colladaファイルに変換後読み込み) |
|
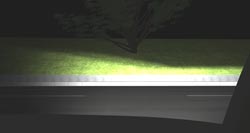
自動車のヘッドライトは、左側通行の場合、右側は対向車とのすれ違い時に幻惑を与えないよう光軸を下げ気味に、左側は障害物や歩行者などを早期発見できるよう光軸を上げ気味にして若干遠方まで見えるようになっています。今回の改訂では、国内外の規格を調査し、よりリアルな表現になるよう照射範囲、照光パターンを改善しました(図11、12)。また、ロービーム、ハイビームの切り替えに対応しました。ハイビームの場合にはより遠くまで照らします。
 |
 |
| ■図11 実車によるヘッドライト(当社撮影) |
■図12 UC-win/Roadのヘッドライト |
|
3Dモデルの任意の位置に対してライトを設定できるようになりました(図13)。これにより、運転シミュレーションの車両にフォグランプやバックランプなどを追加できるようになりました。また、交通流やシナリオで生成した車両のヘッドライトが表現できるようになりました(図14)。なお、一度に点灯できるライトの数はビデオカードの性能に依存しますので、点灯しないライトが発生することがあります。
 |
 |
| ■図13 モデルのライト定義画面 |
■図14 交通流のライトの表現 |
|
従来、運転シミュレーション中に表示可能なミラーは左右のサイドミラー、ルームミラー、スペシャルミラーの4つでしたが、今回の改訂により、いくつでも指定できるようになりました。大型トラックや重機等のように多くのミラーがあるコックピットを正確に表現できるようになります。
 |
| ■図15 6個のミラーを設定した例 |
|
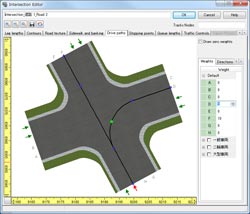
交差点内に動作制御点を追加することができるようになりました。これにより、交通流の車速をコントロールしたり、シナリオでイベントを遷移させたりすることができるようになりました。
 |
 |
| ■図16 交差点の動作制御点 |
|
道路の縦断曲線(放物線)と合わせ、鉄道の単曲線(円弧)に対応しました。
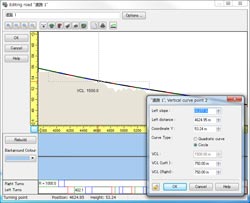 |
| ■図17 縦曲線の設定画面 |
|
クラスターオプション(有償オプション)でシナリオを実行したとき、従来はマスターPCにのみマルチメディア表示(画像やテキスト、ビデオ表示)が可能でしたが、今回の改訂により、クライアントPCにおいても表示可能になりました。
 |
| ■図18 クラスターのシナリオ画面例 |
|
中型車のサウンドファイルの更新、及び走行車のデフォルトサウンドプロファイルの設定を改善し、車に関するサウンドのリアリティを向上させました。
|
シナリオ機能でEXODUSプラグイン、マイクロシミュレーションプレーヤプラグインを制御できるようになりました。これにより、避難シミュレーションや交通シミュレーション等の様々なシミュレーション結果の可視化が制御可能になります。
 |
| ■図19 シナリオでEXODUSを制御 |
|
| 今後も、64bit対応や影の描画パフォーマンス向上、交通シミュレーションの改善などの拡張、改善に取り組んでまいります。どうぞご期待ください。 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|



