 |
|
|
|
|
|
|
|
|
|
|
 |
|||||
|
|
||||||
Academy User vol.3同志社大学大学院理工学研究科 情報工学専攻
| |||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
| ▲オープンキャンパスで研究内容を紹介 |
「クルマ同士が情報交換するとか、複数のクルマが情報をセンターに集め、そこで解析して(得た情報を再度クルマ側に戻し)クルマを制御するとか、という観点で研究を行っています」
例えば、クルマから無線を経由してデータがセンターに集められ、それらを解析した後の情報は最終的にクルマの制御に使われる必要があります。その際、道路が渋滞していると、周辺の100台規模あるいはそれ以上のクルマから同時にデータが飛んでくるため、処理作業は極めて困難になります。そこで、従来のようにデータを一旦貯めて処理する形ではなく、流れ作業的にデータを高速処理する方式(データストリーム処理技術)の利用によるクルマの安全な制御を目指している、と佐藤教授は同センターにおける自身の研究の一端に触れます。
また、同センターの進化適応型自動車運転システム「ドライバ・イン・ザ・ループ」研究拠点形成の試みは、文部科学省の平成26年度私立大学戦略的研究基盤形成支援事業に採択されています。これを受けて同センターでは、高齢者を想定したドライバーと走行中のクルマ、周辺環境をリアルタイムにセンシングし、ヒトの動作を予測して周辺環境に適応した車両の運転支援技術を確立しようというプロジェクトに着手。完全な自動運転ではなく、低下した機能に特化し運転を補助することで高齢者などのモビリティ確保を図ることにウェートを置いています。
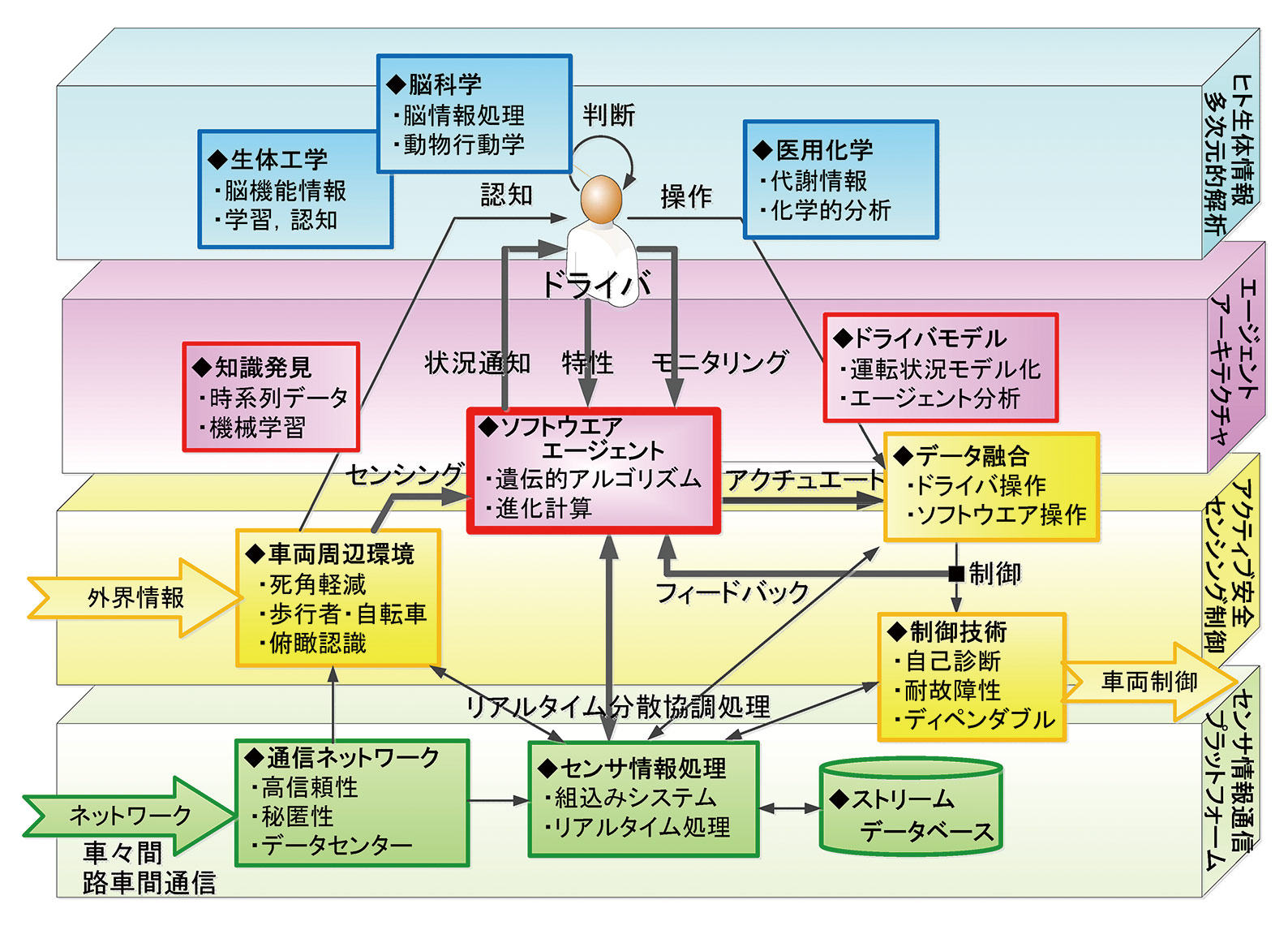 |
| ▲「ドライバ・イン・ザ・ループ」 (ヒトとクルマの共存および周辺車両や環境との協調を行う進化適応型自動車運転システム)研究 |
一方、クルマ同士が繋がるという観点からは皆が同じ規格を使うことが前提となります。とはいえ、各国関係者の思惑もあってなかなか難しいのが実情。佐藤教授はISO(国際標準化機構)ITS専門委員会日本代表の一人として、通信ネットワークの標準化を巡る国際間の調整に努めています。
ネットワーク情報システム研究室では、以前から交通流やセンシングのシミュレータを保有しており、模擬的にクルマを走行させてセンサでデータを集めるような機能は4、5年前から整備されていました。加えて、ZMP製の1/10モデルの車両(一人乗りのロボカー)も導入。それらと連携させた研究も進めてきていました。
ただ、そのままではドライバーの評価などを行うには制約があり、また例えば、実際に100台のクルマを用意して走らせ、データ交換して処理するというのも難しい。やはり、多様な研究に対応できるDSが必要になると考えられました。
そこで各種のDSを比較検討。「(研究目的で使うため)いろいろなプログラムをその上で作ってDSを操作し、あるいはシミュレータのデータを取り込んで、それをまた別の機能に活かす」といったニーズに基づき、フォーラムエイトの「UC-win/Roadドライブ・シミュレータ」の採用に至った、と佐藤教授は振り返ります。
これを受けて同研究室は昨年、5画面のDSを2セット導入。その際、両DSともにZMPの車両と連携する機能が組み込まれました。これにより、それぞれのDSで走行しているクルマを模擬し、データを集約・処理して情報をドライバーに提供したり、それでクルマを制御したりといった形のDS利用環境を構築。併せて、ネットワークで連携する車両をDS側から制御したり、大学構内を走行する車両の情報をDSに反映したりできるようになっています。
「他社のシミュレータと違い、プログラミングが出来、シミュレータのデータを吸い上げてそれに基づいて(DSを)操作できるところ」、また「実際の車両あるいは別のシミュレータとうまく連携できるようなっているところは(UC-win/Roadドライブ・シミュレータの)利点と思っています」
 |
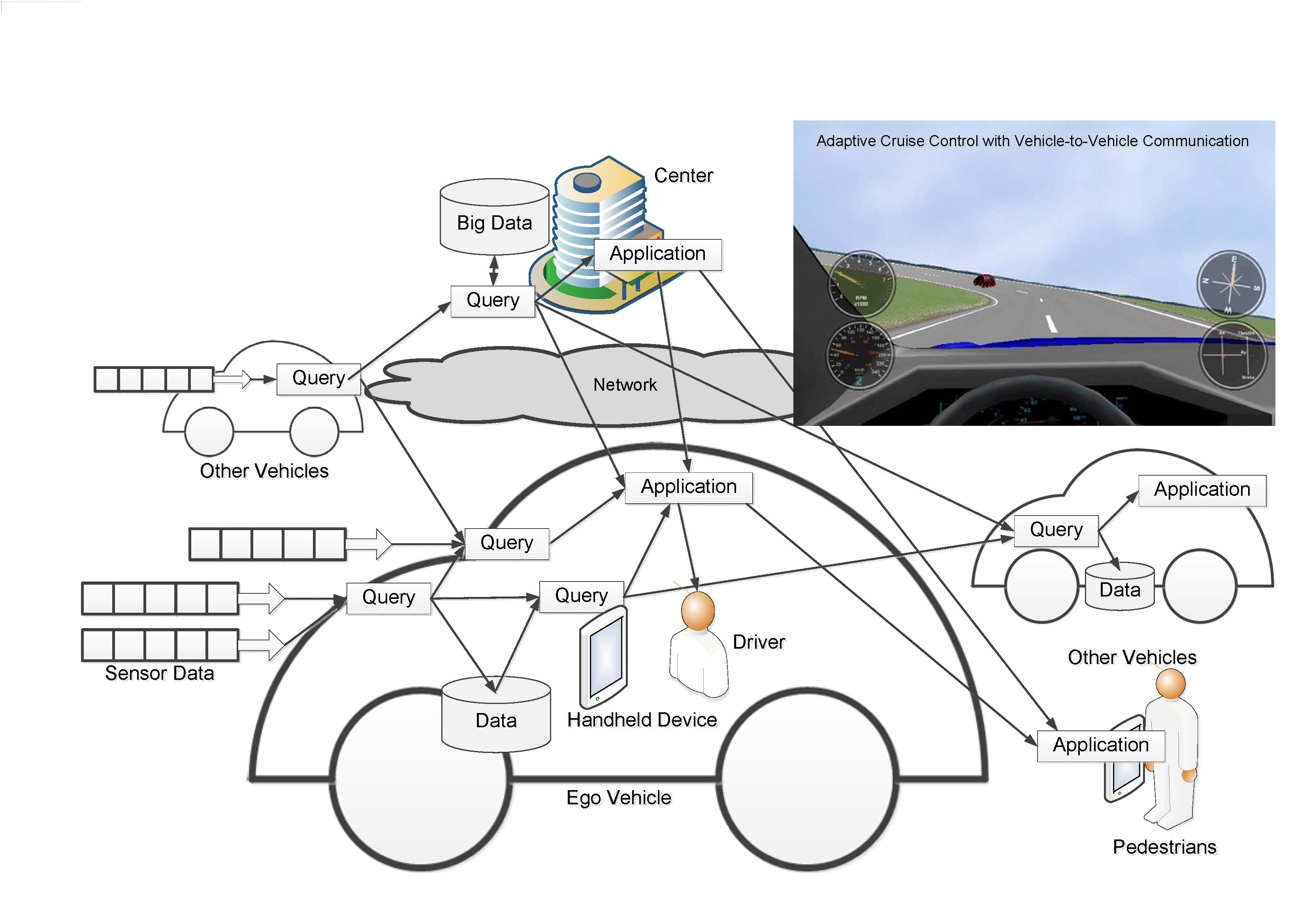
広範囲のセンサ情報を共有 各車両のセンサデータ,物体検出データ,走行データを共有
|
 |
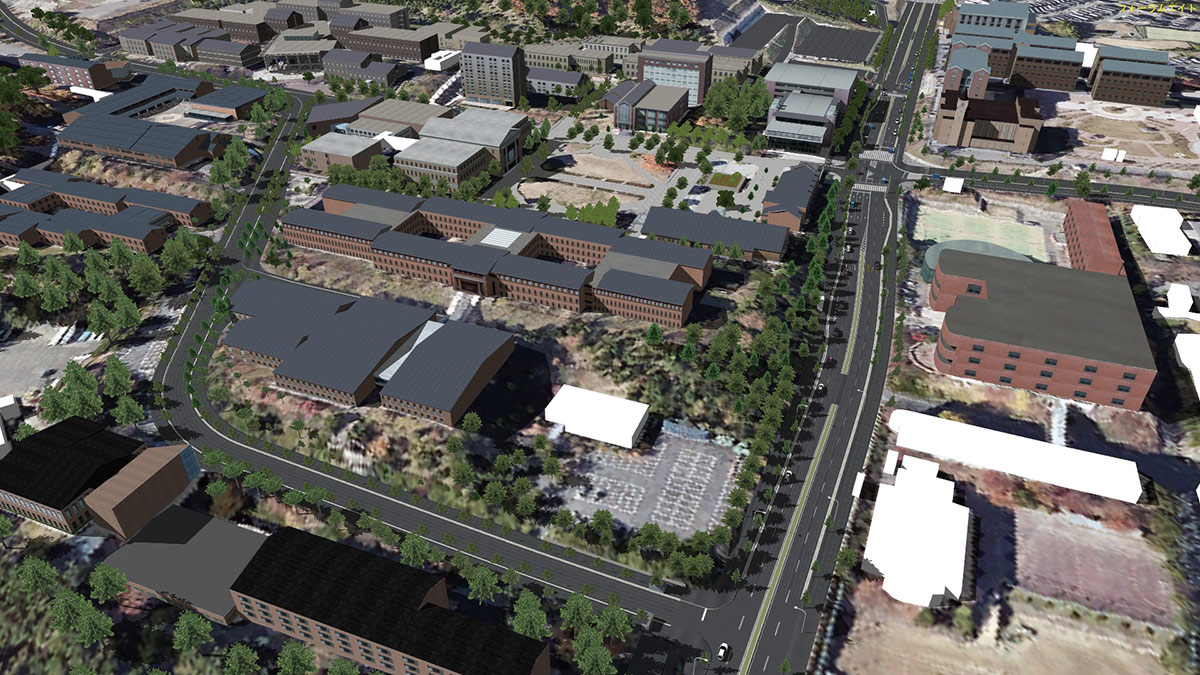
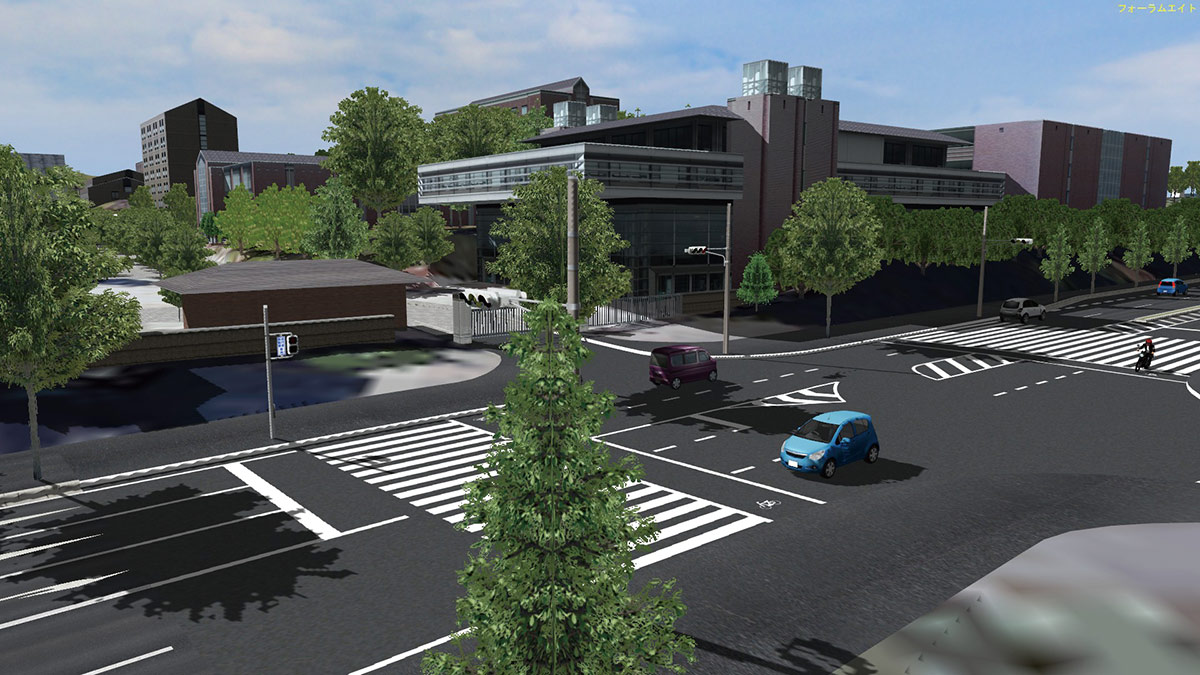
研究室では既に学生の皆さんが様々な研究にこのDSを活用。例えば、ドライバー特性の評価の検討、それに対して自動運転側がどのようなアルゴリズムでサポートしていけば良いかの検討、あるいはDSの中のクルマのデータを収集してそれを高速処理するメカニズムの研究などが並行して進められています。またそうした中で、移動式3次元(3D)計測システムで計測した点群情報を基に大学構内のVRデータが高精度に作成された作品は、「第13回 3D・VRシミュレーションコンテスト オン クラウド」(2014年11月20日、品川インターシティ ホールにて発表・表彰)で「ノミネート賞」を受賞しています。
 第13回 3D・VRシミュレーションコンテスト・オン・クラウド 「運転サポートエージェントVRシミュレーション」 |
 |
 |
このような研究活動の延長上で佐藤教授が現在注目している一つは、過疎化し、最寄りの公共交通機関まで遠い地域において高齢者のクルマ利用をサポートするための、自動運転の可能性を探る研究です。
ここでも完全な自動運転ではなく、高齢者に自分でしたいように運転してもらい、危険を回避するため、不足するところを自動運転の技術で補足するという考え方が基本。また、ヒトが乗らない時には自動的に帰ってくることも出来るというものです。
その際は、DSと実車とを連携して実験。例えば、実際の街中をVRでDS内に構築し、複数台のDSのクルマが走行。それぞれの車両は情報の提供や交換も可能。また、VR内に実際のクルマをマッピングできるとともに、それをクルマ側にも反映できる ― といったUC-win/Roadドライブ・シミュレータの機能を前提とした利用シーンを描きます。
 |
2台のDSはZMP社の超小型車両とも連携しており、 大学構内での走行実験が進められいる。 |
 |
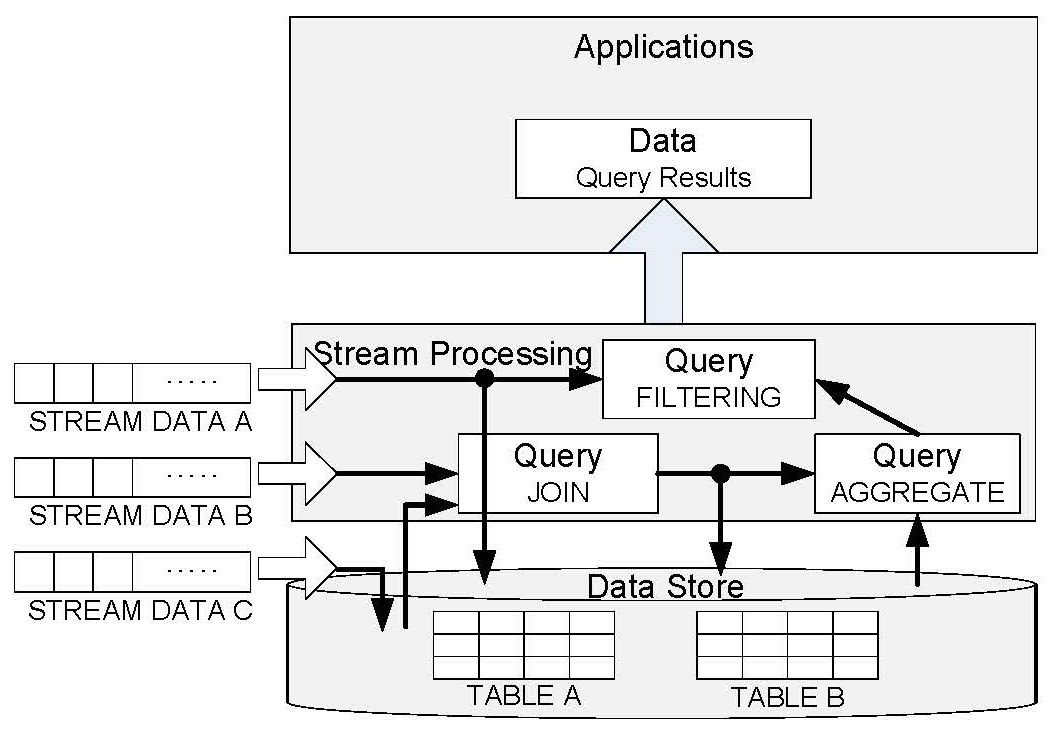 |
| ▲車両データの分散協調処理ネットワーク | |
一方、研究ベースや標準化の取り組みなどで学外の組織や企業などと共同で行っている活動はあるとはいえ、新しいモビリティを開発・利用するようなことを考えれば、さらに広範囲の企業や自治体、専門家らを巻き込んでいく必要がある、と佐藤教授は説きます。
「(今あるものをさらに広げ)」最終的には世界規模でそういった連合が出来れば良いと思っています」

|






| 最近リリースした製品 | ||||||||||
|
| キャンペーン実施中 | ||||||||
|
| セミナー・イベントカレンダー | ||||||||
開催間近のセミナー
|
ソフトウェア/支援サービス
|
|||||||

