|
これは同社施設の一室にドライビングシミュレータ(DS)を設置。市販の各種ソフトウェアやハードウェアを適宜活用しつつ、CAD図面を基に駐車場内の空間を3Dでシミュレーションできるようシステム化したもの。「その中でより具体的にクルマを動かして車路や車室、スロープ(斜路)などをシミュレーションするためにUC-win/Roadを使っています」。導入前からUC-win/Roadの可能性に注目していたという同本部の御担当者は、同システムでのUC-win/Roadの位置付けに言及。こうしたアプローチが浸透してくるとともに、当初は基本設計のチェックの一環として3Dによる可視化が取り組まれたのに対し、近年は可視化自体のニーズのウェートが増大してきているといいます。
連接バスの検討ニーズ受け車両軌跡作図システムを導入
「私は(駐車場の)ハード面でいろいろな作業をしていまして。CADやIllustratorを使い、例えば、『駐車場の路面ペイントやサインはこうした方が良い』というの(のイメージ)を具体的にパソコン上で作り、資料に落とし込むと(いったことをメインに行っています)」
そう語る同本部コンサルティング部の吉村奨氏がフォーラムエイトの「車両軌跡作図システム」を初めて使用したのは、連接バスの走行軌跡を描くことが求められた2年前に遡ります。
同本部ではそれまで長く、車両の軌跡を描く別のプログラムを利用。ところが、ビルの下部に大型バスターミナルを建設するという案件で、連接バスの車両軌跡について検討する必要が浮上。ただ、同社の既存ソフトではそれに対応できず、市販ソフトで唯一それが可能だった当社の車両軌跡作図システムを導入。これの利用により、施主に対し「この車路は(連接バスが走行しても)軌跡上問題ありません」といった説明、あるいは「この辺りは設計上、(連接バスの走行が)ちょっと難しいので、こういう形でいかがですか」といった提案に繋げてきたといいます。
「それまで単体の車両の軌跡しか描けなかったのですが、連接した車両の軌跡を描けることによって(その成果を)検証協議に使用できるようになる等、事業者さんからもすごく助かったという声をいただいています」
VissimとUC-win/Roadを連携し有効活用
「私は(駐車場の)ハード面でいろいろな作業をしていまして。CADやIllustratorを使い、例えば、『駐車場の路面ペイントやサインはこうした方が良い』というの(のイメージ)を具体的にパソコン上で作り、資料に落とし込むと(いったことをメインに行っています)」
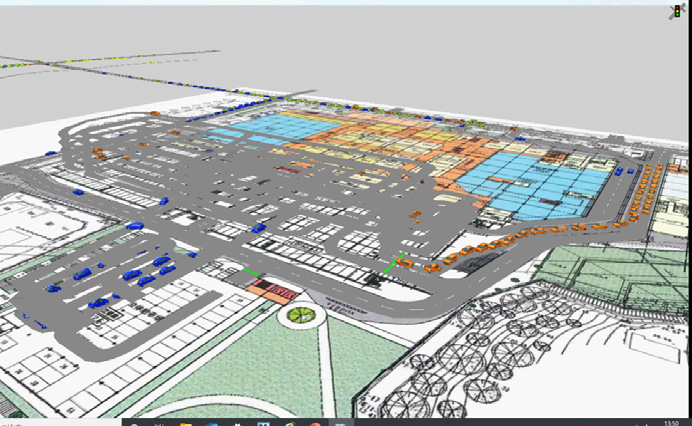
一方、5年ほど前、5,000台収容の大型駐車場の建設に絡むコンペが実施され、ゼネコンなど複数社がこれに参加。そのうちの1社からの依頼を受け、同社は設計段階の駐車場で1時間に何台のクルマを処理し所定の車室に駐車させられるかの検討を担当。その際の交通シミュレーションで初めてVissimを使い検証作業を行った、と池上技術顧問は振り返ります。
同本部では以降、1)2,500台収容の大型駐車場において基本設計を基にスロープ部分の改善案を数パターン、交通シミュレーションにより処理時間の短いものから順位付けして行った提案、2)始業時刻の前1時間ほどに入庫するクルマが集中する従業員駐車場における交通処理の検証、3)近接する交差点の処理能力や周辺道路への影響も考慮するための、交通信号や周辺エリアからの流出入を含む駐車場内の交通処理の検証
― など、様々なプロジェクトでVissimの利用を進めてきました。
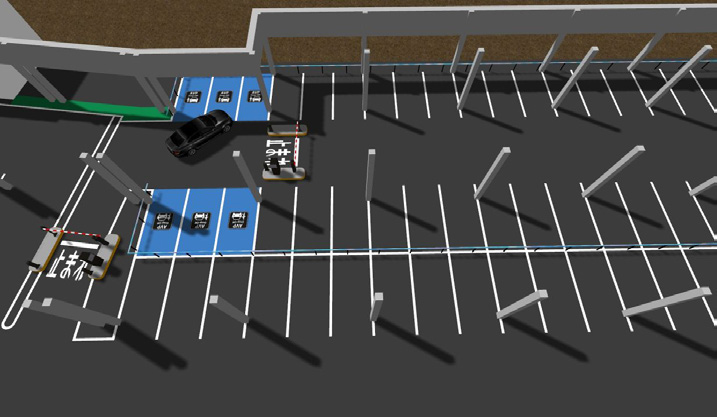
そのような中で2年前、駐車場における自動運転技術の検討を行った際、同本部ではUC-win/Roadを導入しています。そこではUC-win/Roadの、Vissimでは表現できないクルマの動きへの対応が可能でありながら、Vissimと同様にクルマの挙動シミュレーションも可能な機能に注目。また、UC-win/RoadはVissimの交通流解析結果を読み込み、可視化することが可能。加えて、Vissimが大量の車両を扱う交通処理の再現を得意とするのに対し、UC-win/Roadは1台1台のクルマがどう動いているかの再現に容易に対応するなど、両者の相互補完的な機能に期待。上記検討では、自動運転の個々のクルマの挙動を再現できることがキーとなり、UC-win/Roadの採用に至ったといいます。
そこでは「1台のクルマが走ってきて一旦停車し、バックして車室に駐車。その後再び走り去る」という一連の動きの、各種前提条件をパラメータとしてUC-win/Roadに入力。その上で例えば、「1時間に自動運転のクルマが50台、手動のクルマが100台、駐車場に来た場合」の全150台の動きを、両者の比率を変えつつUC-win/Roadで再現しています。
|