 |
前回は、米国の大学の建築学部におけるロボティック・ファブリケーション技術の最新動向を中心に取り上げました。今回は、同国の大学での熾烈なポスト争い事情と併せ、安価で容易な電子工作を実現するArduino
を取り入れたワークショップ等を紹介します。
■著者プロフィール
楢原太郎氏は、米国マサチューセッツ工科大学、ハーバード大学で学び、現在はニュージャージー工科大学で教鞭を執られています。大学教育の現状やコンピュータ、デザインなどの専門分野の動向などを現地からレポートいただく企画です。 |
 |
|
| Vol.3 |
テニュアートラックでバトルロワイアル/ARDUINO! |
テニュアートラックでバトルロワイアル
近頃は日本の大学関係の採用状況も困難を極めていると聞くが、今回は著者もリアルタイムで体験している日本には余り無いテニュアー・トラック制度について簡単に記す。これは、米国で専任教師として採用された者の通過儀礼的なサバイバルゲームの一種で通例5〜8年を要して、その教員の資質、適性、学内での需要を審査し、晴れて通過した暁にはアシスタント・プロフェッサーからアソシエイトにランクが格上げされ、終身雇用的な立場が与えられる。逆に斬られると衛星軌道的に50,60
歳に成っても他の大学を回り続けてこのプロセスを遣り直す事になり、しかも現状の米国でテニュアートラック付の職を得る事は大学のレベルを問わず非常に難しい為、周回軌道から外れて塵と消えて行く場合も多い。
またハーバード大学や一部の超有名校では5年程度の契約期間後、テニュアー審査を通る事は初めからほぼ不可能に出来ていて、特に建築意匠の様にトレンドが頻繁に入れ替わる教員の賞味期限が比較的短い分野では、暗黙の意図として一定期間で教授陣を入れ替えて、ホットな人材を引張ってきて学内活性化を図る格好の機会となる。一部の研究者として超一流と評価された者や、そつなく学内政治を征して成り上がった猛者のみが残るが、超有名校を首になっても他大学の学部長に抜擢されたりして大逆転する人もいて、年中泣いたり笑ったり激動のストーリーが今も展開中である。
大体何処の大学でも3年目に学部内での中間審査があり、その後大学全学部の各委員代表による審査が最終段階である。これは形式的なお約束事的審査では無く、結構、私の周りでも落伍者や降格者が続出中である。著者の様にインターネットの公募で現職を見付けて運よく採用されてしまった様なよそ者外国人にとっては未だに実感が薄いが、子供の養育費等を抱えている一般的なアメリカ人の同僚達にとっては死活問題で、若手教員同士が集まってもそれ以外に話題が無い位に深刻なのだ。著者も赴任当初は先輩方からテニュアー審査が有るからああしろ、こうしろと訳が分からん内から再三教育的指導を入れられて気が狂いそうに成ったが、これに救われたのか最近運良く中間審査をクリアした。
審査方法に関しては評価項目が、教育、研究、教務(各種委員会のミーティングに永遠と参加する事)の3本柱と成っていて日米の相違は余り無い様だ。この3
項目をやけくそに纏めまくって百科事典並みに厚くしたバインダー3冊を期日までに叩き出すのが通例だ。敢えて言えば、デザイン系の学部ではジャーナル系査読論文の数が足りなくても、アートや建築作品が受賞していたり価値があると判断されれば融通利かせて評価する傾向が強い。但し最終審査で純粋理工学分野の教授から難癖つけられて審査基準で揉める事は東西問わず有るようだ。また教育に関しては授業内容、学生の作品を纏めたもの、そして最後に多くの教師にとって頭痛の種である悪夢の13項目に渡る学生による授業の評価(Evaluation)が加わる。
因みに助教(授)・准教授等のランク付けの日米に於ける整合性に関しては、米国のアシスタント・プロフェッサー=日本の助教授とは安易に言えない様である。米国では専任教員=終身雇用の図式は無い為か、アシスタントであっても社会的地位自体は比較的高く認識されている様である。ダイナミックに変動していく概念なので一概には言えないが、現状では日米で全く異なる物差しと言う印象を著者は持った。大学教育関係者以外の方には全く無縁なドライな話題で面目なかったが、著者としては首が在る内に書かせて頂けて本望である。
Arduino(アルドゥイーノ)
先日、本誌で他のコラムを担当されている大阪大学の福田先生が今年は会長を務めてられている、CAADRIA(The
Association for Computer-Aided Architectural Design Research in Asia) と言うアジアを中心とした建築とCADの学会で、アルドゥイーノというハードウェアを使って若手研究者や学生20
人程を対象に、基礎から始めて一日で簡単なロボットを作ってしまうというワークショップを開いて来た。(http://www.caadria2013.org/workshop.html)
Arduino(アルドゥイーノ)とは電子工作が安価で簡便にできるマイクロコントローラを使った統合開発環境の事で、最近の家庭用3Dプリンター等の普及と相俟って、DIY(Do
It Yourself) カルチャーの流れを代表する世界的ヒット商品として定着した観がある。
 |
 |
■シンガポールでCAADRIA 学会に参加。様々な有名建築家作品に溢れる建築- 動物園と化している。
繋がった屋上がプールに成っている超高級ホテル(左)。
右はその庶民版の高層アパート。繋がった屋上は一般開放されていて地下鉄用カードで入れる |
電子工作や回路設計と言うと一昔前までは一々抵抗値を計算して自分でアナログ回路を設計したりして、一部のオタッキーなラジオ少年を除いては、一般デザイナーの忍耐や知力を凌駕した敷居の高い物であった。だが此処へ来てぶっちゃけた話Arduino
に各種センサーやモーター等の作動系の部品をぶっ差して簡単な入出力系のロジックのコードを書いてやれば、インタラクティブなディバイスや可動建築のプロトタイプが誰でも開発可能と成った。「コーディングは一寸」と言う人でもYouTube
等ウェブ上で世界中のホビイスト達の実例が閲覧出来るので大体のコンポーネントの使い方は見よう見真似で出来てしまうであろう。MITメディアラボから発信されて来たタンジブルメディア等のフィジカル・コンピューティングの概念は我々を魅了して来たが、10年一寸で一般の素人でもアイディアを形にする事が夢ではない時代がやって来た。
秋葉原をうろつけば光センサー、距離、音、温度、湿度、圧力、加速度センサー(iPhone
とかに入ってる傾きが読めるやつ)...と様々な状態を感知するセンサーが超安く手に入り、状態変化に応じてモーターやLED
電球を作動させるコードをArduino サイトから無償でダウンロードできる開発環境のエディター上で書いてしまえば簡単なフィードバック機構の完成である。更にホストコンピューター上のProcessing
の様なソフトウェアを介して自分で作ったアプリ上から制御する事も出来、デジタル⇔フィジカルの境界を消し去る事も可能だ。
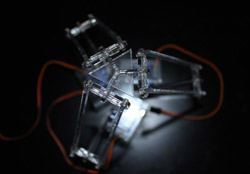
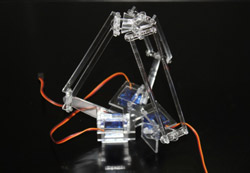
実際のワークショップではデジタル/ アナログ入出力の読み書き、基本コードを光センサーやモーターを使って実体験しながら学び、最後にデルタロボットと言う工場等で部品の仕分けやパッケージングに使われる産業用ロボットを各自、レーザーカッターで切り出し、全てはめ込み式の一切接着剤や金具を使わないプラスティックの部品で組み立てて終わった。これにはフラットな2Dパーツをレーザーで高速に切り出して3次元可動パーツを経済的に製作するノウハウ伝授の意図がある。画面上のマウスを動かして3
つのサーボモーターを制御し、並列リンク機構を使ったロボットアームを直感的に上下左右に操作するインターフェイスの作り方を通して、逆運動学(InverseKinematics)
の基礎や、パソコン− Arduino間のシリアル通信の方法を解説した。インタラクティブな可動建築製作スキル習得に特化した、教科書的理論を一切無視した実用的なものであったが、中々好評であった。一日で全てマスターは厳しいが時間が有れば各自が独自のアイディアで製作を発展させていくシナリオも加えて行きたい。
 |
 |
■「Open Robotic Systems for Adaptive Buildings」と題してしてモーターをコントロール。
CAADRIA 学会でArduino を使ったワークショップを開催。その様子 |
最後はマイクロソフト社のゲーム機器Kinectを接続してゼスチャーで前出デルタロボットを操作する方法も解説して終わった。これはカメラ画像から物体の奥行きが読み取れる最も安価なセンサーで、奥行情報を元に人体の骨格をリアルタイムで取得してパソコン上のアプリを経由してArduinoを使った各種ディバイスを直感的に手や体の動きで操作するものである。著者は大学の授業課題でもやる気ゼロの学生対策として、こうしたゲーム機器を積極的に取り入れている背景があるのだが、これについてはまたの機会に記したい。
 |
 |
■デルタロボット製作を通して可動建築等製作に必要な入出力系制御について学ぶ。
レーザーで切り出した全てはめ込み式の部材を組み立てる事によって可動間接が簡単に出来る。
右がArduino と光センサーやモーター類、これだけでも充分結構あそべる |
 |
 |
 |
 |
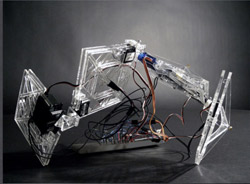
■各パネル上のセンサーから光量の平均値を最大化する配置を捜してパタパタと動き回る、
著者によるArduino を使ったコンセプトモデルの一例。左上は前出デルタロボットを別の角度から |
 |
 |
■学生によるマイクロソフトKINECT を使った可動ブラインド・ファサードの試作品。
手の動きに合わせてその部分のブラインドが捲れて視界や透過率を調節。
左端に検出された人体骨格、その位置情報からARDUINO を介してモーターをコントロール。 |
|
|
|
| (Up&Coming '13 夏の号掲載) |
 |
|







>> 製品総合カタログ

>> プレミアム会員サービス
>> ファイナンシャルサポート
|


