●はじめに
建設ITジャーナリストの家入龍太です。昨年(2016年)は「VR(バーチャルリアリティー)元年」
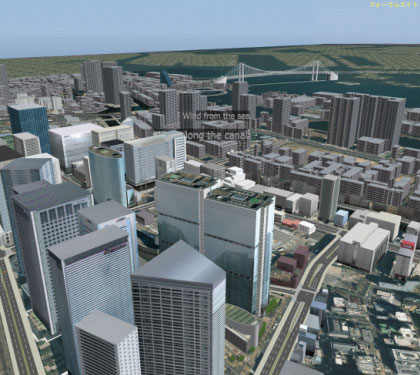
と呼ばれ、世の中のVRに対する関心が一気に高まりました。しかし、そのはるか昔の2000年に、フォーラムエイトは主力製品である3DリアルタイムVRソフト「UC-win/Road」をリリースしています。
当初は道路設計支援を行うソフトとして開発されましたが、その後は、まちづくりの合意形成や津波や洪水、土石流などの災害シミュレーション、さらにはドライビングシミュレーターや鉄道シミュレーターなどハードとの連携も広がり、幅広く機能を持つ3次元設計支援システムへと大変身を遂げました。そして、今なお進化を続けています。
|
|
 |
▲3D配筋CADで作成した配筋の3次元モデル。
2次元CADよりも鉄筋の空間的な配置が分かりやすい |
●製品概要・特長
昨年6月、最新バージョンであるUC-win/Road Ver.11が発売され、様々な新機能が追加されました。
VR元年にふさわしい機能としては、没入感のスクリーンに対応した「CAVEシステム」や「ヘッドトラッキング」機能があります。ドライビングシミュレーターの運転手の頭の動きをセンサーでとらえ、視点の動きに合わせてスクリーンに表示する映像を調整するものです。また、レンダリングエンジンを更新し、影のレンダリング品質を高めたほか、映り込みなどの光反射処理を向上させました。
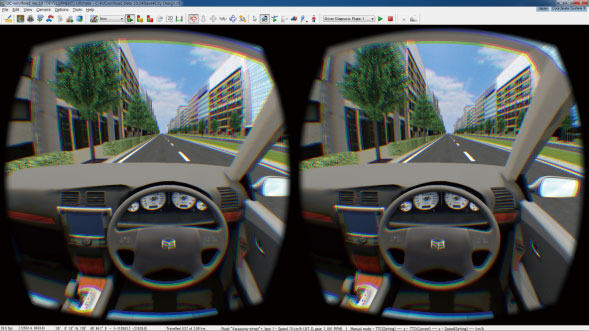
すでに1つ前の「Ver.10」では、ヘッドマウントディスプレー「Oculus Rift」を使ってUC-win/Roadの映像を実物大で立体視できるプラグインも開発されています。これらの機能で、よりリアリティーの高いVR映像を体験することができるようになりました。
国土交通省が2016年度から始めた「i-Construction政策」で、急速に工事現場での活用が進んだドローン(無人機、UAV)との連携機能も進化しました。「UAVプラグイン」というものです。UC-win/Roadの3D空間でドローンの飛行経路や飛行計画を作成し、ドローンにアップロードします。すると、3Dでリアルタイムにモニタリングしながら、ドローンを自動操縦させることができます。
 |
 |
| ▲左右の目の位置に応じて作られた「Oculus Rift」用の映像 |
▲UAV操縦システム ドローンの飛行計画も可能 |
異なる視点から撮影した複数の写真データや動画データをもとに、建物の3Dモデルや点群データを自動生成する「Sfm(Structure from
motion)」プラグインも発売されました。
このほか、Ver.11ではGPSの軌跡情報をインポートして道路の平面線形や縦断線形を自動的に算出する「線形算出機能」や、フリーの地理情報データと連携できる「OpenStreetMapプラグイン」など、多彩な機能が追加されました。
●セミナーの内容
 |
|
フォーラムエイト東京本社で1月19日、9時30分から16時まで、丸1日間にわたり「UC-win/Road VRセミナー」が開催されました。希望者はその後、「FORUM8認定VRエンジニア試験」を受けられます。この試験は、フォーラムエイトがUC-win/Roadの活用スキルを認めるもので、合格すると認定証が交付されます。
この日、講師を務めたのは、フォーラムエイトVRサポートグループの清水駿太リーダーと九冨陽介さんです。清水リーダーがデモンストレーション、九冨さんが解説と操作実習を担当しました。
|
Ver.11ならではの充実した機能
セミナーではまず、UC-win/Roadの概要と最新機能の解説が行われました。Ver.11ともなると、製品構成ラインナップはとても充実してきました。通常のパソコンによる設計、検討に使う「Standard」「Advanced」「Ultimate」をはじめ、実車型のドライビングシミュレーターと連携する「Driving
Sim」、データの閲覧専用の「Presentation Version」、複数のモニターに画面に分けて出力する「Cluster Client
Version」と「Multi User Client Version」などが開発され、目的に応じて使われています。
|
UC-win/Roadを使ってVRデータを作る手順は、地形入力→道路定義→道路生成・交通流生成→編集・出力・VRシミュレーションという順序で進んでいきます。この手順に沿って、機能の説明が行われました。
手間のかかる地形の入力には国土地理院が公開している50mメッシュの標準地形データや数値地図5mメッシュ(標高)のほか、NASAなどが公開している全世界データなどを読み込むことができます。
このほか、BIM(ビルディング・インフォメーション・モデリング)やCIM(コンストラクション・インフォメーション・モデリング)による設計で使われているLandXMLやIFC、ShapeFileの各形式を読み込んだり、
オートデスクのAutoCAD Civil 3Dの地形データを読み込んで「地形パッチ」というより精細な地形を
生成したりすることもできます。様々なデータとの連携で、地形の入力は以前よりもかなり楽になりました。
|
|
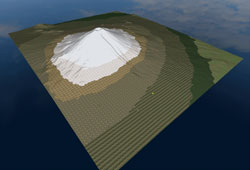 |
| ▲VRの土台となる地形の作成 |
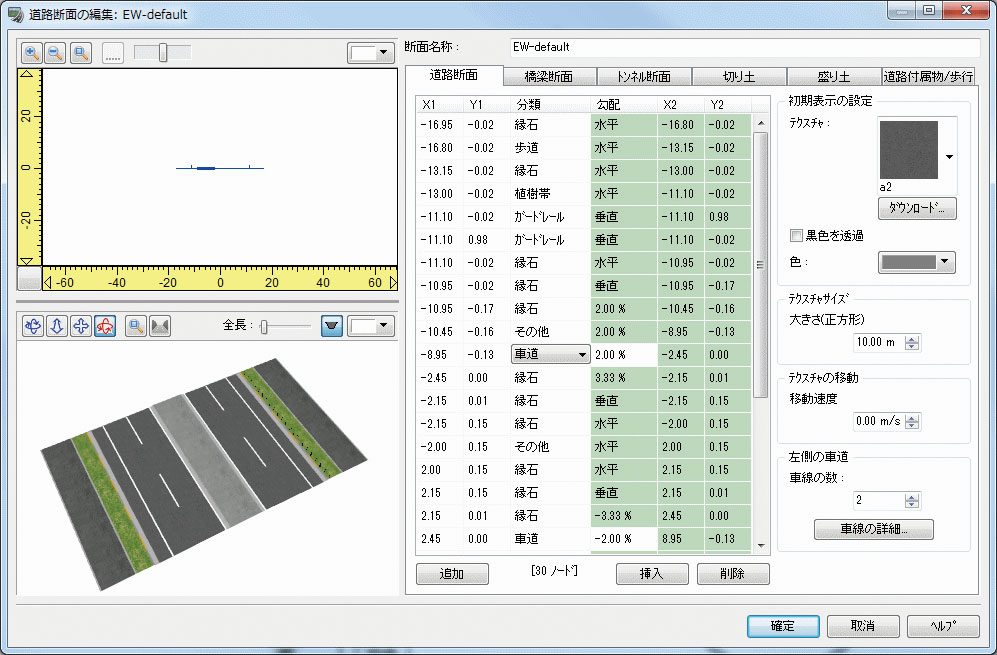
道路定義・道路生成は、航空写真や数値地図を読み込んだり、土木分野で道路線形を引くときに使われるIP法を使ったりして効率的に行えます。UC-win/Roadには、道路の車線数や歩道の有無などが異なる様々な道路断面データを用意しており、道路の区間ごとに断面を指定していくだけで、あっという間にリアルな道路モデルが出来上がります。また断面が徐々に変わるすりつけ区間や交差点、盛り土や切り土、トンネルなども、簡単に作ることができます。
VRで重要なのは人やクルマが動き回る躍動感です。また樹木や煙、風などの自然現象もリアリティーを高めるのに欠かせません。これらの3Dモデルは動きのあるものも用意されているので、メニューから選んで3D空間上に配置していくだけで、ダイナミックなVR作品が出来上がっていきます。
 |
 |
 |
 |
| ▲充実した道路のモデル |
▲動く人物やクルマの3Dモデル |
パソコンを操作して町のVRを作成
続いて午前から昼休みをまたいで15時まで、セミナー参加者が各自でパソコンでUC-Roadを操作して、VRデータを作る実習を行いました。実習はまず、地形入力→道路定義→モデル配置の手順でVRデータを作ります。その後、景観シミュレーションや運転シミュレーション、プレゼンテーションなどを行うという流れです。
|
この日は、長野県安曇野市の地形が題材になりました。同市は平地と山地が半分くらいずつあり、方向がよくわかります。地形データはUC-win/Roadに標準搭載されている国土地理院50mメッシュの10km×10kmのものを使いました。
地形が読み込まれると、まずは3D空間上での移動や視点を回転させるトレーニングです。上下左右への移動や回転、クリックした方向に高速移動する飛行、上空から見たところに移動する衛星などの機能をリボンメニューから選びながら練習しました。
操作に慣れてきたところで今度は東京の渋谷区と目黒区あたりの地形を選び直して航空写真を真上から見たように補正した「オルソ画像」を張り付けて、VRデータの土台となる立体地図を作りました。
|
|
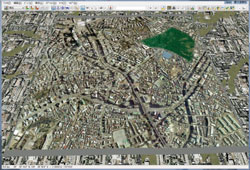 |
▲東京の航空写真を3D地形に張り付けて作った
リアルな立体地図 |
次に、この上に道路を作っていきます。道路の線形は起点と終点の間を「IP」という折れ点でつないだ折れ線が基本になります。そして、この折れ点部分をスムーズなカーブでつなぐことで、道路らしい曲線が出来上がります。
UC-win/Roadの立体地図上に起点→折れ点→終点と3つの点をマウスでクリックして選んで大体の位置を決めた後、各点の正確なXY座標を数値で入力します。その後、道路を側面から見た画面に切り替え、各点の高さデータを入力していきます。これで、3Dの道路線形が決まりました。
この線形に対して、道路断面を選び、道路線形の上に設定していきます。デフォルトでは「片側2斜線、中央分離帯あり、ガードレールあり」の道路になっていますので、実際の道路に変更します。道路断面のメニューには、車線数や車線幅、ガードレールの有無、歩道の幅などが異なる様々なものがあらかじめ用意されているので、選んで読み込むだけで作業完了です。ここでは「2車線(歩道・植樹帯あり)」の断面に変えました。
 |
 |
▲道路断面を設定していくとVRはぐっと
リアルになる |
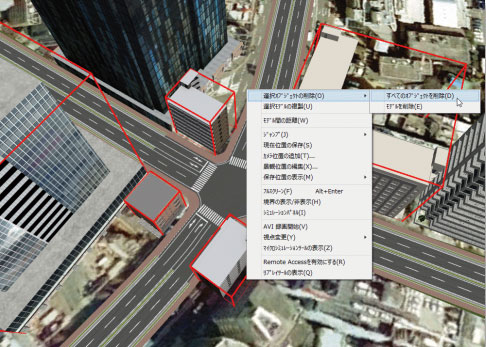
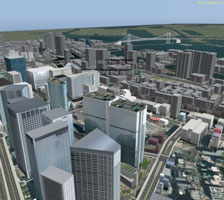
▲交差点周辺に様々なビルの3Dモデルを
設置してVRはひとまず完成 |
また、道路の起点は小山の中に設定してあります。デフォルトでは地形よりも高いところは盛り土、低いところは切り土が自動生成されます。切り土の場合は「トンネル」、盛り土の場合は「橋梁」に設定を変えることもワンタッチでできます。
だんだん、町らしくなってきたところで、交差点を作って停止線や横断歩道の白線を描いたり、歩道のタイルのテクスチャーを変えたりして道路を仕上げていきました。最後にビルの3Dモデルを交差点付近に配置して、町のVRモデルが出来上がりました。
様々なシミュレーションにチャレンジ
出来上がったVRモデルを使って、最初に行ったのは景観シミュレーションです。VRの時刻を変えると、太陽の位置とともに影の長さが変わったり、夜景になったりします。気象も晴れや曇りに変えたり、雨や雪を降らしたりと、様々なシーンがシミュレーションできます。
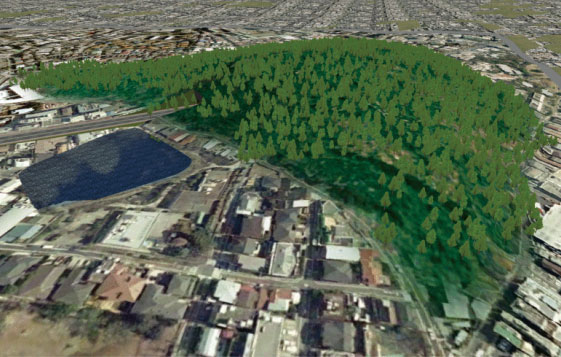
また、湖を作ったり樹木を配置したりするシミュレーションも体験しました。森林作成機能を使うと、数千本の樹木を一度に配置することができます。
 |
 |
| ▲天気を変化させて雪景色にしたところ |
▲山にたくさんの樹木モデルを配置して
森林化した |
続いて、VRの街並みをクルマに乗ってドライブする運転シミュレーションに挑戦しました。といっても、自分のクルマだけでなく、ほかのクルマを何台もVRの中に走らせて、交通流に乗って運転します。交通流は1時間あたりに道路を通るクルマの台数を指定して発生させます。
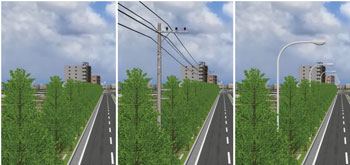
最後に行ったのは、まちづくりのプレゼンテーションです。現在の並木道に電線や照明灯が設置されると、景観がどのように変わるのかを現在、設計前、設計後と切り替えて、あたかも現場に出掛けたかのように比較・検討することができます。これなら住民説明会などでの説明や、合意形成もスムーズにいきそうなことが実感できました。
 |
 |
▲運転シミュレーション。
ドライバー目線で道路の見通しなどがわかる |
▲まちづくりのプレゼンテーション。
並木道に電線や照明灯を設置して景観を比較検討 |
●イエイリコメントと提案
建設やまちづくりの分野では、ようやくIT(情報技術)を活用した本格的な生産性向上の実現に期待が高まっています。その理由は、複雑な3D形状をした建物や土木構造物などの全体像を、BIMやCIMによってデジタルデータ化できるようになったことが挙げられます。クルマや人の流れが重要な要素となるまちづくりでは、UC-win/Roadのように動きまでをデジタルデータとして表現できるVRシステムができたことが、生産性向上の原動力になるでしょう。
UC-win/Roadはまだまだ進化の余地を残していると思います。それはまちづくりの分野でIoT、すなわち「モノのインターネット」の中核システムとしての役割を担うことです。IoTとは、あちこちに配置したセンサーなどからのデータをインターネットで集め、コンピューターで分析し、最適な対応策をインターネットでフィードバックするものです。
データを集めて分析する部分には、現実の世界をコンピューターのモデルで表現した「デジタルツイン」(双子のデジタルデータ)といいますが、UC-win/Roadはまさしくまちづくりの分野でのデジタルツインとして機能することができるわけです。
のフィードバックのサイクルが、数年にもわたることがあります。そのため、データの収集やフィードバックには、現在のところ必ずしもインターネットは使われず、ドローンや航空レーザーなどによる測量結果をもとにデータを作ったり、検討の結果は人が運転する重機や作業員によって施工されたりします。しかし、現実→デジタルデータによる分析→現実へのフィードバックはIoTと同じなのです。
●製品の今後の展望
UC-win/Roadは現在でも、APIによって様々なデータをインポートできるようになっています。今後は、交通量や渋滞長、人の動き、風向・風速などのリアルタイムなデータをインポートし、表示できる機能を持たせることにより、IoTのデジタルツインとして機能できるようになります。その先には、さらにAI(人工知能)やビッグデータとの連携という限りない発展の可能性がありそうです。
|