|
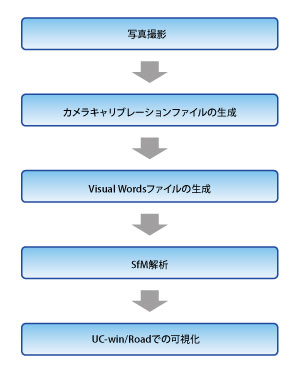
SfMプラグインでは、リアルタイム解析またはバッチ解析を行うことができます。リアルタイム解析は、フォルダにアップされた画像を瞬時に解析し点群を生成します。ただし、大量のメモリを消費します。
バッチ解析は、解析の前に対象の写真を設定し、設定した写真のみを解析して点群を出力する解析モードです。メモリ使用量が少なく、リアルタイム解析に比べ多数の写真を解析できますが、連続した写真のみを処理するため、不連続な写真が入力された場合は解析結果が得られません。
バッチ解析
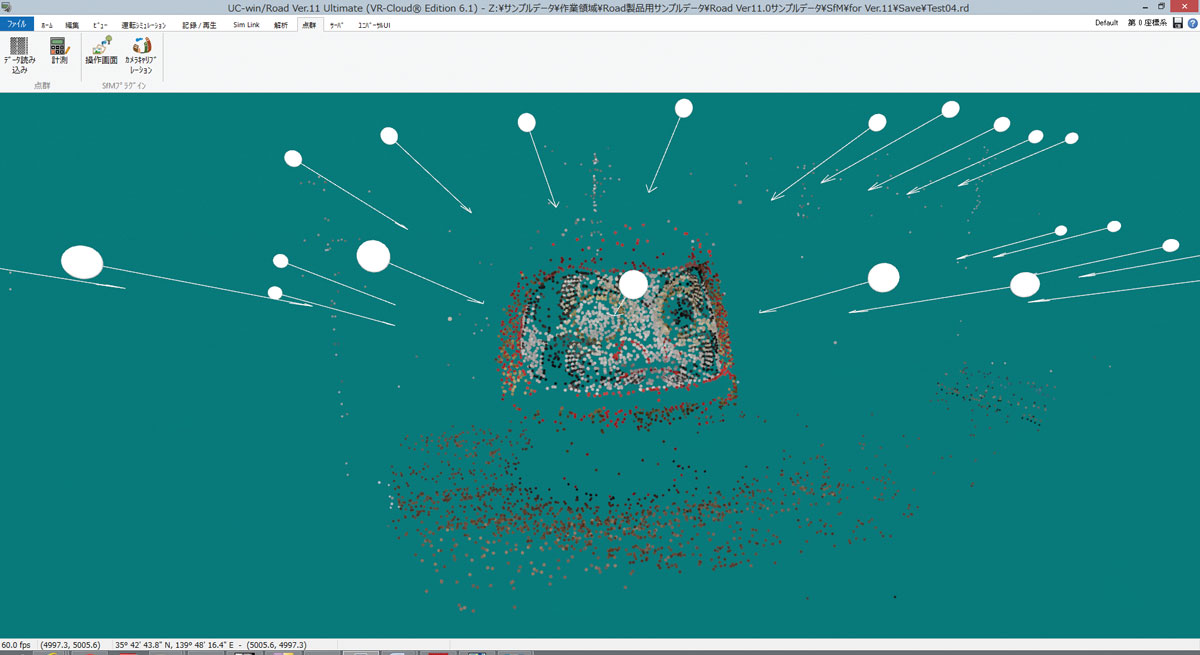
解析する写真を選択し、解析条件を設定します。解析を開始すると、選択した各々の写真の視点位置が算出され、3次元空間上に示されます。解析が進むにつれて点群の数も増え、次第に構造物が明確になってきます。全ての画像の解析が終了しましたら空間上の点群を確認します。点群の数が少ないようであれば、解析条件で「点群量を優先」の選択を行い、再度解析を行います。
また途中で解析が終了してしまうような場合は、開始画像を変更したり、解析が停止してしまう画像を除去して、再度解析を行ないます。
特徴点検出アルゴリズム
特徴点検出に使用するアルゴリズムとして、SIFT、SURFから選択できます。
SIFT(Scale Invariant Feature Transform)
特徴点の検出と特徴量の記述を行うアルゴリズムで、スケール変化や回転などが記述されます。SURFに比べ、処理速度は遅いですが認識精度が高いとされています。
SURF(Speed Up Robust Features)
SIFTを改良し高速化したアルゴリズムで、SIFTに比べて処理速度が速いですが認識精度が低いとされています。

■図4 撮影写真 |
■図5 SfMプラグイン画面 |

■図6 SfMプラグインによる解析結果:点群、カメラの位置と向き
(白色の球体と矢印表示) |
|